Pidurisüsteemide hooldus. Tee- ja pinkimismeetodid ja auto diagnostika parameetrid Pidurisüsteemi seadmete diagnoosimine
Remont pidurisüsteem Kõigi autode puhul on vaja siiski diagnoosida pidurisüsteemi tehnilist seisukorda iga mitme tuhande kilomeetri järel, on vaja vähendada autopiduri rikke tõenäosust.
Jagage sotsiaalsete võrgustike töö
Kui see töö ei tule lehe allosas, on sarnaste tööde nimekiri. Võite kasutada ka otsingunuppu.
Lehekülg \\ * Mergeformat 28
P.
|
Sissejuhatus .................................................................................................... |
|
|
1.1. Pidurisüsteemi kasutamise põhimõte ........................................ |
|
|
1.2. Pidurisüsteemide tüübid .................................................. ........ |
|
|
1.3. Peamised elemendid pidurisüsteemi auto ....................... |
|
|
2. Pidurisüsteemide diagnoosimise meetodid ja seadmed |
|
|
2.1. Pidurisüsteemi peamised talitlushäired .................................. |
|
|
2.2. Nõuded piduri süsteemidele ........................................... ... |
|
|
2.3. Pidurisüsteemide diagnoosimise meetodid ja seadmed ...... |
|
|
3.1. Valik diagnostika seadmed……………………………... |
|
|
3.2. Valitud seadmete tehnilised omadused ............ ... |
|
|
Järeldus ……………………………………………………………. |
|
|
…………………... |
Sissejuhatus
Autode arv muutub üha enam, nende arv suurendab igal aastal kogu maailmas. Ja autode arvuga suureneb õnnetuste arv, mis on tingitud suurema hulga inimeste arv sureb ja jääb endiselt puudega ja külge. Sobimatu tehniline seisukord Ja autode käitamine on paljude õnnetuste peamisi põhjuseid. Õnnetused, mis tulenevad erinevate autosüsteemide ebaõnnestumisest kõige tõsisemad tagajärjed.
Teema asjakohasus referaat See on see, et auto ohutuse eest vastutav kõige olulisem süsteem on pidurisüsteem. Autode projekteerimised paranevad pidevalt, kuid pidurisüsteemi olemasolu jääb muutumatuks, mis aitab vajadusel kaasa peatada auto, mis säilitab jalakäijate, juhtide ja reisijate elu, samuti teiste osalejate elu. tee. Pidurisüsteemi remont on vajalik kõigil sõidukitel, aga on vaja diagnoosida pidurisüsteemi tehnilist seisukorda iga mitme tuhande kilomeetri järel, see on vajalik autopiduri ebaõnnestumise tõenäosuse vähendamiseks.
Kursuse eesmärk - auto pidurisüsteemi diagnoosimise tõhususe parandamine, arendades soovitusi pidurisüsteemide diagnostiliste seadmete valimisel ja.
Selleks on vaja lahendada järgmineÜlesanded:
- tehke analüüs autode pidurisüsteemi;
- avastage pidurisüsteemi diagnoosimise meetodeid;
- uurige pidurisüsteemide diagnoosimisel kasutatavaid seadmeid.
Objekti uuring Kas tehnoloogia diagnoosimine on pidurisüsteemi diagnoosiminee Me oleme autod.
Uuringu teema tähistab diagnoosi vahendeid ja meetodeidumbes auto pidurisüsteemi voogesitus.
UurimismeetodidSelles töös kasutatakse üldistamismeetodeid, võrdlusi, analüüsi ja analooge.
Kursuste struktuur koosneb sissejuhatusest, kolmest peatükistaga kesty ja kasutatavate 10 allikate loend.
1. Pidurisüsteemi seade
1.1. Autopiduri põhimõte
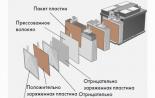
Hüdraulilise süsteemi näidet on lihtne mõista. Piduripedaali vajutamisel edastatakse piduripedaali rõhujõudu peamiseks piduriballoonile (joonis 1.1).
See sõlme teisendab jõupingutusi, mida rakendatakse piduripedaalile hüdraulilise pidurisüsteemi survet, et aeglustada ja peatada auto.
Joonis fig. 1.1. Peamine silindri seade
Tänapäeval on pidurisüsteemi usaldusväärsuse suurendamine, kahe sektsiooni peamised silindrid on paigaldatud kõigile autodele, mis jagavad pidurisüsteemi kahe kontuurideks. Kaheosaline silindri pidurdamine võib tagada pidurisüsteemi jõudluse, isegi kui üks kontuurid on paigutatud.
Kui autos on vaakumvõimend, siis peamine pidurisilinder on kinnitatud silindri enda üle või on teises kohas, kus piduri vedelik asubmis ühendab peapidurisilindri osadega painduvate torude kaudu. Vajadusel on tank vaja juhtimiseks ja piduri vedeliku juhtimiseks ja täiendamiseks. Tanki seintel on vedeliku taseme vaatamiseks saadaval. Ja ka andur on paigaldatud paaki, mis järgib piduri vedeliku taset.
Joonis fig. 1.2. Peamise pidurisilindri skeem:
1 - Vaakumpiduri võimendi varras; 2 - kinnitusrõngas; 3 - esimese ahela kontoriga avamine; 4 - esimese ahela kompenseeriv avamine; 5 - esimene tank sektsioon; 6 - teine \u200b\u200btank; 7 - teise kontuuri byphase avamine; 8 - teise ahela kompensatsiooni avamine; 9 - teise kolvi kevadel; 10 - peamine silindri juhtum; 11 - mansett; 12 - teine \u200b\u200bkolv; 13 - mansett; 14 - esimese kolvi kevadevedru; 15 - mansett; 16 - Väline mansett; 17 - Boot; 18 - Esimene kolb.
Põhipidurisilindri korpuses on kaks kolvi kahe tagasiviirusega ja tihendavad kummist mansettidega. Pistoni, piduri vedeliku abil luua survet süsteemi tööreaktsioonis. Seejärel tagastage tagasiprined kolb algse asendisse.
Mõned autod on varustatud anduriga peapidurisilinder, mis kontrollib kontuuride rõhu langust. Kui ei ole tihedust tekib, hoiatab see juht õigeaegselt.
Peamise pidurisilindri töö kohta:
1. Piduripedaali vajutamisel põhjustab vaakumvõimendi varras liikumist 1ST kolvi (joonis 1.3.)
Joonis fig. 1.3. Pidurisilinder töö
2. Hüvitise avamine on suletud, liikudes silindri läbi kolvi ja rõhk on loodud, mis toimib 1. kontuuril ja liigutab järgmise ahela 2. kolb. Ka teise kolvi liikumine oma ahel suletakse kompensatsiooniava ja loob ka rõhk 2. ahela süsteemi.
3. Kontuuride tekkinud rõhk annab tööpiduriballoonide töö. Ja tühjus, mis moodustati, kui kolbide liikumine on kohe täis pidurivedelikuga spetsiaalsete ümbersõitde avadega, takistades seeläbi süsteemi sisenemist, tarbetut õhku.
4. Pidurdumise lõpus pöörlevad kolvid tagasipöördumise vedrude tegevuse tõttu algsele asendisse. Samal ajal saavad kompensatsiooni augud paagiga sõnumeid ja tänu sellele rõhutasemele atmosfääriga. Ja sel ajal tembeldatakse auto rattad.
Pisto peapidurisilinder omakorda, mis hakkab liikuma ja seeläbi suurendab rõhku hüdrauliliste torude süsteemis, mis viib kõigi auto ratastega. Pidurivedelik kõrgsurve all kõigil auto ratastel, millel on ratta kolvi mõju piduri mehhanism.
Ja mis juba omakorda liigub piduriklotsid ja need pressitud vastu piduriketta või piduri trumli auto. Rattade pöörlemine on aeglustunud ja auto peatub hõõrdejõu tõttu.
Pärast piduripedaali vabastamist tagastab tagasipöördumise vedru piduripedaali algse asendisse. Püüdes, mis tegutseb peamise trumli kolviga, nõrgendab ka oma kolvi, naaseb ka tema kohale, sundides neid piduriklotsid hõõrdumisvooludega, vabastades seeläbi trumli rattad või kettad.
Autode pidurisüsteemides kasutatakse ka vaakumpiduri võimendi. Selle kasutamine hõlbustab märkimisväärselt auto pidurisüsteemi toimimist.
1.2. Pidurisüsteemide tüübid
Pidurisüsteem on vajalik sõiduki aeglustamiseks ja auto täielikuks peatamiseks ning selle säilitamise kohapeal.
Selleks kasutab auto mõningast pidurisüsteemi, nagu ka parkimine, töö, lisasüsteem ja varu.
Tööpidurisüsteem Kasutatud pidevalt, igal kiirusel, et aeglustada ja peatada auto. Tööpidurisüsteem aktiveeritakse piduripedaali vajutamisega. See on kõige tõhusam süsteem kõigi teiste.
Varupidurisüsteem Kasutatakse peamise veaga. See juhtub kujul autonoomne süsteemi või selle funktsioon täidab osa töötava tööpidurisüsteemi.
Seisupidurisüsteem Vajadus auto hoidmiseks ühes kohas. Parkimissüsteem, mida ma kasutan auto spontaanse liikumise vältimiseks.
Lisapidurisüsteem Rakendatakse autoga suurenenud massiga. Lisasüsteemi kasutatakse nõlvadel ja -puhastes. See ei ole harva, see juhtub, et autode rolli abisüsteemi mängib mootor, kus väljalasketoru kattub klapp.
Pidurisüsteem on auto kõige olulisem lahutamatu osa, mis tagab aktiivne turvalisus Draiverid ja jalakäijad. Paljud autod kasutavad erinevaid seadmeid ja süsteeme, mis suurendavad süsteemi tõhusust, kui pidurdamine on lukustussüsteem (Abs ), hädapidurdusvõimendi (Bas. ), piduri võimendi.
1.3. Autopiduri peamised elemendid
Auto pidurisüsteem koosneb piduri kettast ja piduri mehhanismist.
Joonis.1.3. Piduri hüdrauliline diagramm:
1 - Kontuurjuhtme "Vasakpoolne tagumine piduri"; 2-signaali seade; 3 - Kontuur torujuhtme "Parem ees - vasakpoolne tagumine pidur"; 4 - peamine silindri tank; 5 on hüdrauliliste pidurite peamine silinder; 6 - vaakumvõimendi; 7 - piduripedaal; 8 - rõhuregulaator tagumised pidurid; 9 - kaabel seisupidur; 10 - Pidurimehhanism tagaratas; 11 - seisupiduri reguleerimiskivi; 12 - seisupiduri käigukang; 13 - esiratta pidurimehhanism.
Piduri mehhanism Sõiduki rataste pöörlemine on blokeeritud ja selle tulemusena ilmub piduri jõud, mis põhjustab auto peatuse. Pidurimehhanismid on ees ja tagumised rattad auto.
Lihtsamalt öeldes, kõik piduri mehhanismid võib nimetada hästi. Ja juba omakorda neid saab eraldada hõõrdumise - trummel ja ketas. Põhisüsteemi pidurisüsteemi pidurdusmehhanism on paigaldatud rattale ja parkimissüsteemi mehhanism asub jaotusmaterjali või edastamise taga.
Pidurimehhanismid koosnevad tavaliselt kahest osast fikseeritud ja pöörlemiseni. Fikseeritud osa on piduriklotsid ja trumli mehhanismi pöörlev osa on pidurirumli.
Drumin piduri mehhanismid(Joonis 1.4.) Kõige sagedamini seisavad auto tagarattad. Töötamise ajal kulumise ajal kasutage lõhet kinga ja trumli suurendamise ja mehaaniliste regulaatorite vahel selle kõrvaldamiseks.
Joonis fig. 1.4. Drumin piduri taga ratta mehhanism:
1 tass; 2 - Kinnitusvedru; 3 - sõiduhoob; 4 - piduriklots; 5 - Ülemine löögivedru; 6 - Spacer plank; 7 - kiilu reguleerimine; 8-ratta pidurisilinder; 9 - Piduriskilp; 10 - polt; 11 - varras; 12 - ekstsentriline; 13 - Eesmärk kevadel; 14 - Alamkambri kevad; 15 - Spring Spabela plank kinnitamine.
Autodel võib kasutada mitmesuguseid piduri mehhanismide kombinatsioone:
- kaks trumli taga, kaks ketta ees;
- neli trumlit;
- neli ketast.
Piduri ketta mehhanismis(Joon. 1.5.) - Ketta pöörleb ja sees kalkuri paigaldatakse kaks fikseeritud plokki. Pidurisaduris on pidurdamisel paigaldatud töötajad Soojuse eemaldamise suurendamiseks tööpiirkonnast kasutatakse sageli ventileeritud plaate.
Joonis fig. 1.5. Ketaspiduri diagramm:
1 - ratta hunnik; 2 - Juhend sõrme; 3 - vaatamise auk; 4 - pisipadi; 5 - ventiil; 6 - Töö silinder; 7 - Pidurivoolik; 8 - piduriklots; 9 - ventilatsiooni auk; 10 - Piduriketas; 11 - rattarumm; 12 - väärkasutus.
2. Pidurisüsteemide diagnoosimise meetodid ja seadmed
2.1. Basic pidurisüsteemi talitlushäired
Pidurisüsteem nõuab ennast tähelepanelikult, sest Auto on keelatud, vigase pidurisüsteemiga. Selles peatükis käsitletakse pidurisüsteemi peamisi talitlushäireid, nende põhjuseid ja viise nende kõrvaldamiseks.
Suurendatud piduripedaali töö. See ilmneb töötavate silindrite pidurivedeliku puudumise või lekete tõttu. See tuleb asendada töötavate silindritega, loputage padjad, kettad, trummid ja lisage vajadusel piduri vedelikku. Ja see aitab kaasa pidurdussüsteemi löögile, sel juhul on see lihtsalt vaja eemaldada süsteemi pumpamisega.
Ebapiisav pidurdusvõime. Piduriklotside lihvimise või kulumise ajal ei esine ebapiisav pidurifektiivsus, samuti on võimalik liituda kolvikutega töötavate silindrite, piduri mehhanismide ülekuumenemise, ühe kontuuride depresseerimisega, madala kvaliteediga padjate kasutamise, operatsiooni rikkumise kohtaABS jne
Auto mittetäielikud diskummi rattad.See probleem tekib siis, kui piduripedaalil ei ole vaba liikumist, peate lihtsalt kohandama pedaali asukohta. Probleemiks võib olla ka kõige olulisema silindri tõttu kolvide kohtumise tõttu. Vaakumvõimendi varraste või kummist tihendite suurenemine võib olla suurenenud bensiini või õli tõttu, mis on tingitud bensiini või õli tõttu, siis sel juhul on vaja asendada kõik kummist osad, samuti loputada ja pumbata kogu hüdraulikasüsteemi.
Pöörates ühe rattad, kui pedaal vabaneb.Tõenäoliselt nõrgendas tagumiste rataste padjade messing kevadel või korrosiooni või lihtsalt saasteainete tõttu - kolvi ratta silindris, siis on vaja asendada töösilindri. Kinnituspolde nõrgendamisel on võimalik häirida ka piduripiduri asendit seostumise asendisse. Seal võib olla ikka veel rikkumine tööAbs , ratta silindri tihendusrõngaste turse, parkimissüsteemi vale reguleerimist jne.
Driva või kõrvalekalle sirge liikumisest pidurdamisel.Kui auto liigub mööda korterit ja kuivat teed pidurdamise ajal, hakkasid igas suunas tagasi lükkama, siis võib see olla peamise silindri kolvi edendamine, ummistuvad torud, mis on ummistumise, reostuse või põletamise tõttu, erineva rõhul Rattades ja ei pruugi olla üks pidurisüsteemi ahelatest.
Suurenenud jõupingutusi piduripedaalide pidurdamisel. Kui on vaja auto peatamise peatamiseks vaja lisada palju jõupingutusi, siis vaakumvõimendi on tõenäoliselt vigane, kuid ka voolik on ka kahjustatud, mis ühendab mootori sisselasketoru vaakumvõimendiga. Ja samuti on võimalik võõrustada peamise silindri kolvi, kandke padjaid ja uusi plokke saab veel paigaldada, mis lihtsalt ei ole töötanud.
Suurenenud müra pidurdamisel. Kui piduriklotsid on kulunud, siis pidurdamisel tekib pidurdamine, kuna kulumise indikaatori hõõrdumine, ketta libistades. Ka padjad või ketta saab soolata või saastunud.
2.2. Nõuded auto pidurisüsteemidele
Auto pidurisüsteem, välja arvatud disaini üldnõuded, on suurenenud erinõuded, sest See tagab autoliikluse ohutuse teel. Seetõttu peaks pidurisüsteem vastavalt nendele nõuetele esitama: \\ t
- minimaalne pidurduste vahemaad;
- autode stabiilsus pidurdamise ajal;
- stabiilsus piduriparameetrid sagedase pidurdamisega;
- pidurisüsteemi kiire käivitamine;
- piduripedaali ja rataste rataste jõupingutuste proportsionaalsus;
- kontrolli lihtsus.
Auto pidurisüsteemid on nõudeid, mida reguleerivad UNECE reeglid nr 13, mida kohaldatakse Venemaal:
Minimaalne piduri tee. Autode pidurisüsteem peaks olema väga tõhus. Õnnetuste ja õnnetuste arv on väiksem, kui aeglustuse maksimaalne väärtus on kõrge ja ligikaudu võrdne erinevate autodega ja mooli liikuva autoliigiga.
Ja ka piduri liinid autode peab olema samaaegselt üksteise lähedal, erinevus umbes 15%. Kui minimaalne piduri tee väheneb, mitte ainult kõrge liikluse ohutus tagatakse, vaid ka suurenemine keskmise kiiruse auto.
Vajalikud tingimused Minimaalse pidurdusraja saamiseks on see väikseim aeg, mis on vajalik sõiduki pidurdava auto käivitamiseks ning kõigi rataste pidurdamine samal ajal ja võime pidurdusjõudude maksimaalsele sidumisväärtusele tuua ja tagada soovitud jaotus Sõiduki rataste vahelised pidurijõud vastavalt koormusele.
Piduri stabiilsus. See nõue suurendab auto pidurdamise tõhusust väikeste siduskoefitsientidega (jäine, libe jne) ja suurendab seeläbi kõigi osaliste turvalisuse taset teedel.
Vastavalt pidurijõudude ja taga- ja esirataste koormuste proportsionaalsusele tagatakse auto pidurdamine maksimaalse aeglustusega teedel.
Stabiilne pidurdamine. See nõue on seotud pidurdusmehhanismi kuumutamisega pidurdamise ajal ja võimalikult vähese kahju hüvitamise ajal kuumutamisel. Niisiis, kui kütmisel piduri trumli (ketas) ja hõõrdepadjad padjad, hõõrde koefitsient väheneb. Lisaks, kui küttepiduri küte, suureneb nende kulumine oluliselt.
Piduriparameetrite stabiilsus sõiduki sagedasel pidurdamisel saavutatakse piduri hõõrdumiste koefitsiendiga, mis on umbes 0,3-0,35, mis on praktiliselt sõltumatu kiirusest libisemise, soojendamise ja vee kiirusest.
Auto pidurisüsteemi tööajast sõltub pidurdustee sellest, et oluliselt mõjutab oluliselt liikumise ohutust. Peamiselt sõltub piduri draivi tüüp vallandamissüsteemist. Auto S. hüdraulika Seal on 0,2-0,5 sõidukites koos pneumaatilise draiviga 0,6-0,8 ja teerajad pneumaatilise draivi 1-2. Nende nõuete täitmisel on erinevate autoohutuse märkimisväärne suurenemine erinevates maanteelingimustes.
Piduripedaali jõupingutusi auto pidurdamise ajal peaks olema 500-700 h (minimaalne väärtus sõiduautod) Pedaali käigus 80 - 180 mm.
2.3. Pidurisüsteemide diagnoosimise meetodid
Autode pidurisüsteemide diagnoosimiseks kasutatakse kahte peamist diagnostilist meetodit - tee ja seista.
- Maanteel diagnostiline meetod on mõeldud pidurispassi pikkuse määramiseks; pidev aeglustumine; Autode stabiilsus pidurdamise ajal; Pidurisüsteemi tööaeg; Tee kalle, millele auto peab endiselt seisma;
- Seisu katsemeetod on vajalik üldise pidurdusjõu arvutamiseks; Teise rataste pidurijõudude mittevastavuse koefitsient (suhteline ebaühtlus).
Praeguseks on piduri omaduste mõõtmiseks palju erinevaid seisake ja seadmeid erinevate meetodite ja meetodite abil:
- inertsiaalsed platvormid;
- staatiline võimsus;
- power Roller seisab;
- inertsiaalsed hinnad;
- seadmed, mis mõõdavad auto aeglustumist teede testimise ajal.
Inertsiaalne platvorm. Selle seista põhimõte põhineb inertsjõudude mõõtmisel (pöörlemis- ja järk-järgult liikuvatest massidest), mis tulenevad auto pidurdamise ajal ja rakendatakse sõiduki sidumispaigas dünamomeetri platvormidega.
Staatiline võimsus seisab. Need seisavad on rull- ja platvormi seadmed, mis on mõeldud ümberpööratud ratta "jaotuse" ja samal ajal rakendatud jõu mõõtmise "jaotus. Statistilised võimsuse seisavad on pneumaatilised, hüdraulilised või mehaanilised ajamid. Pidurdusjõudu mõõdetakse ratta riputamisel või kui seda toetatakse sujuvatele tööruumitele. Sellel meetodil on pidurite diagnoosimise puudumine - on tulemuste ebatäpsus, mille tulemusena ei kordu käesoleva dünaamilise pidurdusprotsessi tingimusi.
Inertsiaalsed rull-seisavad. Neil on rullid, millel on elektrimootori või automootoriga sõita. Teises näites, auto tagumise (juhtivate) rataste tõttu pöörlevad seista rullid ja nendega mehaaniline edastamine - ja ees (ori) rattad.
Pärast seda, kui auto on paigaldatud inertsiaalsele tasemele, reguleeritakse rataste lineaarne kiirus 50-70 km / h kuni 50-70 km / h ja aeglustab järsult, eraldades samal ajal kõik pinki vagunid elektromagnetiliste haakeseadiste väljalülitamisel. Samal ajal tekib seista rullide rataste kontaktkohastes rataste kontaktides inertiajõud, vastupidi pidurijõudude vastu. Mõne aja möödumise pärast pöörlemise pink trumlite ja rataste auto peatub. Iga autoratta möödunud viisid selle aja jooksul (või trumli nurgaaegne aeglustumine) on võrdne piduriradude ja pidurijõududega.
Pidurdustee määrab seista rullide pöörlemise sagedusega, mida fikseeritakse meetri poolt või nende pöörlemise kestusega, mõõdetuna stopperiga ja aeglustumine on nurgeline despometer.
Power Roller seisab Kasutades ratta siduri jõud rulliga, võimaldab mõõta pidurdusjõudu protsessi selle pöörlemise kiirusega 2,10 km / h. Rattade pöörlemist teostavad elektrimootori seista rullid. Pidurijõudude määratakse reaktiivse hetkega, mis esineb pidurirattade standi staatori mootori käigukastis.
Rullpidurite seisab võimaldada pidurisüsteemide kontrollimise üsna täpseid tulemusi. Iga katse kordumisega on neil võimalik luua tingimusi (kõigepealt rataste pöörlemiskiirusest), on absoluutselt identsed eelmistega, mis on varustatud esialgse pidurdusseadme täpse tööga välise draivi abil. Lisaks, kui katsetamine toiterullpiduri seisab, mõõtmise nn "ovality" on ette nähtud hinnang mitte-ühtluse pidurijõudude ühe käive ratta, s.o. Kogu pidurduspinda uuritakse.
Rullpiduri katsetel, kui jõud edastatakse väljastpoolt (piduripinnast), ei riku pidurdamise füüsilist mustrit. Pidurisüsteem peaks absorbeerima sissetuleva energia, kuigi autol ei ole kineetilist energiat.
On veel üks oluline tingimus - ohutuse testid. Kõige ohutumad testid on toiterullide pidurites, kuna katse auto kineetiline energia seista on null. Pidurisüsteemi ebaõnnestumise korral maanteede katsetamise ajal või platvormi piduri seisab, hädaolukorra tõenäosus on väga suur.
Tuleb märkida, et selle omaduste koguväärsusega on see võimsusrull, mis on kõige optimaalsemad lahendused nii diagnostilistele hooldusjaamadele kui ka gothatide diagnostilistele jaamadele.
Kaasaegne võimsusrull pidurisüsteemide kontrollimiseks võivad määrata järgmised parameetrid:
- Sõiduki üldparameetrite kohaselt ja pidurisüsteemi seisundi kohaselt - vastupidavus pöörlemisrataste pöörlemise vastu; pidurdusjõu ebatasandilisus ühe käive ratta; Mass, mis tulevad rattale; Mass tulevad teljel.
- Töö- ja seisupiduri süsteemide kohta - suurim piduri jõud; Pidurisüsteemi tööaeg; Teiste rataste mittevastavuse koefitsient (suhteline ebaühtlus) rataste pidurijõud; Konkreetne piduri jõud; Jõupingutused juhtpaneelil.
Kontrolliandmed (joonis 2.3.) Kuvab ekraani digitaalse või graafilise teabe kujul. Diagnostilised tulemused võivad printida ja salvestada diagnoositud autode andmebaasis arvuti mällu.
Joonis fig. 2.3. Pidurisüsteemi jälgimise andmed:
1 - kontrollitud telje märkimine; Tarkvara esitelje piduri; ST - seisupidurisüsteem; Zo - tagatelje piduri
Pidurisüsteemide kontrollimise tulemusi saab kuvada ka armatuurlaual (joonis 2.4.)
Pidurdusprotsessi dünaamika (joonis 2.5.) Võib täheldada graafilises tõlgenduses. Ajakava näitab pidurijõudude (vertikaalselt) võrreldes püügikoormusega piduripedaali (horisontaalselt). See peegeldab pidurijõudude sõltuvust piduripedaalist mõlema vasaku ratta (ülemise kõvera) ja paremale (alumine kõver).
Joonis fig. 2.4. Pidurduskeskuse armatuurlaua
Joonis fig. 2.5. Braphic Display dünaamika pidurdusprotsessi
Graafilise teabe abil saate jälgida ka vasakute ja paremate rataste pidurijõudude erinevust (joonis 2.6). Graafik näitab vasakute ja paremate rataste pidurijõudude suhet. Piduriskõver ei tohiks minna kaugemale regulatiivkoridori piiridest, mis sõltuvad konkreetsetest reguleerivatest nõuetest. Ajakava muutmise iseloomu jälgimine, diagnostikaoperaator võib sõlmida pidurisüsteemi seisundi kohta.
Joonis fig. 2.6. Vasaku ja parema rattapiduri pidurijõudude väärtused
- Soovitused piduri diagnostikavarustuse valimiseks
3.1. Diagnostiliste seadmete valik
Space piduri seisab on sertifikaat kvaliteedijuhtimissüsteemi vastavalt UNI EN ISO 9001-2000 kinnitab kasutamist edasijõudnud tehnoloogia, kaasaegsete katete, kvaliteetsete materjalide ja komponentide kasutamine, mis võimaldab seadmeid eksportida enam kui nelikümmend maailma riigis.
Auto pidurisüsteemi diagnoosimine toimub rullide poolt, mis on jagatud kolme tüüpi. Piduri seisab on erinev disain ja mootori võimsus, kuid peamine peamine funktsioon on maksimaalne väärtus piduri jõudu (tabel 3.1).
Tabel 3.1
Rull agregaadid piduri seisab
|
Mudel |
Max. Pidurijõu |
|
PFB 035. |
5000 kg |
|
PFB 040. |
6000 kg |
|
PFB 050. |
7500 kg |
|
PFB 715 |
7500 kg (kahekordne kiirus) |
Samuti veel üks oluline omadus - See on auto ratta ja seista rullide vaheline hõõrdetegur. Meie puhul võtame väärtuse võrdne 0,7-ga. Piduri seista valimiseks määratleme pidurdusjõudu.
Pidurikoostöö on auto ratta suhtlemise võimsus rulli välisküljega (auto liikumise imitatsioon mööda teed mööda). Seda väljendatakse Danis.
1 Newton \u003d 0,101972 kg.
1 DAN \u003d 10 Newton \u003d 1,01 kg.
Arvutuste mugavuse huvides võtame 1 Dan \u003d 1 kg 1% väikese veaga.
μ \u003d f / m
Hõõrdetegur μ - võimsuse suheF massiks m.
See väljend tähendab auto massi vahelist seost ja tee liikumiseks vajaliku võimsuse vahel.
Kui meil on paljuM. suheldes pinnaga ja 0,5 kg võimsusegaF. Selle liikumise jaoks on hõõrdekoefitsient μ 0,5.
Pärast seda keskmistatud väärtust valitakse rullikupiduri seista, näiteks PFB 035 \u003d 500 den.
Mootori võimsus (ja roller täiturmehhanism) võimaldab Force F täpseid mõõtmisi 510,2 kg üle 510,2 kg. Rulli puutuja pinnale. Pärast selle suuruse mõõtmist vähendab mootor kiirust ja täiendavaid mõõtmisi ei teostata. Määramiseks maksimaalne massMe kasutame eelmise valemi:
W \u003d f / μ
Me saame 500 kg / 0,7 \u003d 714 kg (ühe rulliga toimib mass). Sellest järeldub, et telje maksimaalne kaal on 1428 kg.
Teise maksimaalse teoreetilise massiväärtuse puhul saame valida PFB 035 mudeli. See valik ei ole täpne, sest hõõrdetegur on väga sõltuv rehvi omadustest (halb rehvil on madalam hõõrdumine) ja muud tingimused. Näiteks ei mõõda maksimaalne pidurdusjõud eelnevalt kahjustatud rehvi pidurdusmisaega, et vältida selle edasist kulumist. Samuti võimaldab teil veidi suurendada maksimaalset telje kaalu. Tuleb märkida, et telje kaal ei ole ainult pool auto kogumassist, kuna mahalaadimata autol on teljel suurem, kuid kui laadite vastavalt auto, suureneb telje koormus.
3.2. Valitud seadmete spetsifikatsioonid
Kosmoseliini (Itaalia) toimimise põhimõte on järjekindel kogumise ja tarkvara töötlemise mõõtmistulemuste ja PBX-i tehnilise seisukorra visuaalse kontrolli mehhanismide visuaalse kontrolli abil tööriistakontrolli pakendis sisalduvate seadmete mõõtevahendite abil. Autode katsetamise protseduuri juhitakse kaugjuhtimispuldi või klaviatuurilt, töödeldud ja salvestatud protsessori poolt, visualiseerimist monitori abil, kõik pilte 3D-graafika, printimise tulemused printerile, liidese ühendamiseks:
- jaama seista;
- vedrustuse tester;
- gaasianalüsaator;
- kimümomeeter;
- tahhomeeter.
Mõõdetud parameetrite nimekiri:
Veeretakistus;
Kettad ovaallisuse või pidurirumli suhteline;
Maksimaalne piduri jõud rattal;
Vahe pidurise jõupingutuste vahel parema ja vasaku rataste vahel ühe silla;
Pidurdamis- ja seisupidurite tõhusus;
Püüdlused jalapiduripedaalil ja käepiduri hoob
Piduri seista saab kogeda mõlemat autot koos autosõiduga kõigi 4WD ratastega. Testimisprotseduur täieliku 4WD draivi autode jaoks on iga silla jaoks jagatud kaheks eraldi faasiks. Esimeses etapis hakkab vasakpoolse rulli agregaadi pöörama liikumist ja paremale - vastupidises suunas. Samal ajal B. väljastuskast Ülekanne teisele teljele on tühjaks ja seetõttu ei edastata pöörlemise hetke ratastele, mis ei seisne rullides. Tulemused kuvatakse pärast mõlema telje testimist. Lõpus mõõtmiste piduri jõupingutusi iga silla, näed pidurdustööde ajakava.
Joonis fig. 3.2. Katseprotseduur on täis autosid.
Pärast kõiki andmeid ja auto tuli alla arvuti mällu, lehekülje lõpliku testi tulemused kogu pidurisüsteemi ilmub monitori ekraanil (joonis 3.2.).
Staatide tehnilised omadusedPFB 035, pfb 040 ja pfb 050 on toodud tabelis 3.2
Tabel 3.2.
Spetsifikatsioonid
|
Spetsifikatsioonid |
PFB 035. |
PFB 040. |
PFB 050. |
|
Laadige teljel transiidi ajal / transiidi ajal, kg |
2500/4000 |
2500/4000 |
2500/4000 |
|
Maksimaalne piduri jõudN. |
5000 |
6000 |
7500 |
|
Täpsus,% |
|||
|
Kiirus testimisel |
|||
|
Power Mootorid, KW |
2x4.7 |
2x5.5. |
|
|
Drumli läbimõõt, mm |
|||
|
Siduskoefitsient |
Rohkem kui 0,7 |
Rohkem kui 0,7 |
Rohkem kui 0,7 |
|
Toitumine, V. |
380 / 3f. |
380 / 3f. |
380 / 3f. |
Hindade kasumlikkuse, remondi ja toimivuse kestuse võrdlus on näidatud joonisel 3.3
Joonis fig. 3.3. Võrdlev seista diagramm (protsendisuhetes).
Järeldus
Kaasaegne auto töötab mitmesugustes maantee- ja kliimatingimustes. Pikk operatsioon toob paratamatult kaasa selle tehnilise seisundi halvenemiseni. Auto või selle agregaatide jõudlus määratakse kindlaks nende võime täita kindlaksmääratud funktsioone ilma kehtestatud parameetrite rikkumata. Auto toimivus sõltub peamiselt selle usaldusväärsusest, mida mõistetakse auto võime kaupade või reisijate ohutuks transportimiseks teatavate operatiivparameetrite täitmisel.
Töö kirjutamisel uuriti spetsiaalset kirjandust, sealhulgas artikleid ja õpikuid, teoreetilisi aspekte kirjeldatakse ja avalikustatakse teadusuuringute peamised mõisted.
Kirjutuskursuse ajal uuriti pidurisüsteemi. Pidurite jõudluse taastamise meetodeid ja meetodeid kaaluti. Kokkuvõttes uuritud materjali põhjal töötati välja soovitusi, et valida Spase diagnostikaseadmed kolmest rullist PFB 035, pfb 040 ja pfb 050. \\ t hinnakategooria, remondi- ja kasutusaja kulud otsustati valida esimese PFB 035 ühiku, kuna see on optimaalsem valik hinnakategooria jaoks ja tehnilised omadused Mitte palju halvem kui ülejäänud seisab, samuti parandus- ja kasutusaja kuludest, mis on esitatud joonisel 3.3, on kasumlikum.
Kasutatud allikate loetelu
1. GOST R 51709-2001. Mootorsõidukid. Tehnilise seisundi ja kontrollimismeetodite ohutusnõuded. - M.: STAROTINFORM, 2010. - 42 P.
2. Derevko V.A. Sõiduautode pidurisüsteemid - m.: PETIT, 2001. - 248 P.
3. Autode diagnoosimine. Töökoda: uuringud. Käsitsi // ed. A.N. Karteshevich. - Minsk: uued teadmised; M.: Infra-M, 2011. - 208 lk.
4. Rullpiduri seisab sõiduautodele:Ruumi. [Elektrooniline ressurss].URL: http: // www. Alpoka. RU / Kataloog / STR 1__13__ ImerID __73. HTML.
5. Diagnostilised ja juhtimisvahendid sõiduk [Elektrooniline ressurss]. URL: http://ktc256.ts6.ru/index.html.
6. Autode hooldus ja remont: tootmisprotsesside mehhaniseerimine ja keskkonnaohutus // V.I. Sarbaev, S.S. Selivanov, v.n. Konplev - Rostov: Phoenix, 2004. - 448 lk.
7. Autode hooldus ja remont: naastu õpik. // V. M. Vlasov, S. V. Zhankaziev, S. M. Kruglov et al. - M.: Publishing Centre Academy, 2003. - 480 P.
8. Autode diagnoosimise, hoolduse ja remondi tehnoloogilised protsessid: uuringud. Käsitsi // v.p. Ovchinnikov, R.V. Needin, M.Yu. Bazhenov - Vladimir: Kirjastus Vladim. Riik Ülikool, 2007. - 284 lk.
9. Autode hoolduse, remondi ja diagnostika tehnoloogilised protsessid: uuringud. Uuringute käsiraamat Kõrgem. Uuringud. Institutsioonid // V.g. Sursa, V.V. Mishooustin. - Novocherkassk: Yurgu (NPI), 2013. - 226 lk.
10. Harazov A.M. Hoolduse ja auto remondi diagnostikatoetus: Ref. Käsiraamat - m.: Kõrgem. SHK., 1990. - 208 P.
Muud sarnased tööd, mis võivad teid huvitada. Ishm\u003e |
|||
| 20713. | Soovituste arendamine auto pidurisüsteemi diagnoosimiseks seadmete valimiseks | 412.16 KB. | |
| Autode disaini parandatakse pidevalt, kuid pidurisüsteemi olemasolu jääb muutumatuks, mis aitab kaasa auto peatamisele vajadusel, mis säilitab jalakäijate, juhtide ja reisijate elu, samuti teiste maanteeosaliste elu. Pidurisüsteemi parandamine on vajalik kõigil autodel, | |||
| 11115. | Auto piduri kvaliteedi parandamine | 1,52 MB. | |
| Välis- ja kodumaiste ettevõtete pidurite arendajad ja ehitajad muutuvad üha eelistatavamaks, arendades plaadipidureid stabiilsete omadustega paljudes temperatuurides, survestes ja kiirustel. Kuid sellised pidurid ei suuda täielikult tagada pidurisüsteemi tõhusat toimimist, lukustumisvastaseid süsteeme (ABS) muutuvad usaldusväärsemaks. | |||
| 7978. | Strateegiline juhtimine. Põhilised lähenemisviisid strateegia valikule | 27.13 KB. | |
| Some konkurentsi ja kiiresti muutuva olukorra ees ei tohiks organisatsioon keskenduda mitte ainult sisemisele olukorrale, vaid ka pikaajalise käitumisstrateegia väljatöötamiseks, mis võimaldaks neil muuta nende muutuste muutusi keskkond. Varem oleks paljud organisatsioonid edukalt pöörama tähelepanu peamiselt igapäevasele tööle siseriiklikele probleemidele, mis on seotud ressursside kasutamise tõhususe parandamisega praegustes tegevustes. Praegu on ratsionaalse ... | |||
| 11416. | Tehnoloogia arendamine hõõrdematerjalide tootmiseks raudteeautode piduriklotside taastamiseks | 1,34 MB. | |
| Seda lõpetamise tööd rakendati eespool nimetatud programmi raames koostöös KMT TTC spetsialistidega PCTU-ga. Di. Mendeleev, masinauuringute instituut (Moskva) ja transpordiakadeemia (Almatõ). Tuleb märkida, et käesolevas dokumendis esitatud andmed on esimesed Kasahstani Vabariigis ja seda tuleks pidada otsingu ja probleemide tulemusteks NIR-i tulemustena | |||
| 16759. | Ettevõtete laenuvõtjate ümberkorraldamine võlausaldajate valimiseks: makro-probleemide lahendus mikrotasandil | 14,73 kb. | |
| Oluline halvenemine majanduslikus olukorras riigis ja maailm ja maailma viis asjaolu, et enamik Venemaa ettevõtete, sealhulgas suur, põrkasid arvukalt rahalisi probleeme ja püsiv võla suurenemine. Vaikimisi kogusumma on see aasta järel alates 2008. aasta septembrist. Põhjuseks seisneb selles, et kõik raha pankanud pankades: toetada finantsturgu ja tööstuse ... | |||
| 6511. | Põhimõtted ostis Systems ARMP kaabel L_Nіynyh Süsteemide trakti | 123,51 KB. | |
| Automaatne korrapärase redusandja komplekt kajastatakse tavalisele Rіvnіv protem pіsyuvachіv mag_stralі vaikimisi luure і jaoks Stub_lіlіzatski Zagasannya kanalid on tantker. | |||
| 8434. | VISA Piirkondlike süsteemide (käe-süsteemid) raamatupidaja, et їh budova | 46,29 KB. | |
| Raamatupidaja TA ~ Budova arstide piirkondliku süsteemi vorm 1. Struktuuride Budova piirkondlikud süsteemid. Whiteva objektide operatsioonisüsteemi süsteemide põhjal on iseloomulik Mozlivih-i pagasi aspekt, mis on Iїch Wobble. Vi_Layyuchi Klasifіkatsіinі Meede AWP ENTAGE SAI SPECIAL PILLIBY їKH BOOTIVIA І Vddovdnimnnya Yak struktuurse-flowsіonal Miscea Zaiman Skin AWP Roses_l Funki-diagnostika Ülesanded Serm Avdosobi Organizatsії Ровазовання соваски за закиніва зранна і іізний півніва комнина і Інші Рівніваргонна і Інші | |||
| 5511. | Soovitused Profiili LLC kulude vähendamiseks | 97 KB. | |
| Ettevõtluse kulud, organisatsioonid on seotud ettevõtte tegevuse peamiste majandusnäitajatega ja majandusliku kasu vähenemine varade kõrvaldamise tulemusena (raha, muu vara) ja (või) tulemuste tekkimise tõttu | |||
| 5115. | Energiatarbimise ja energiasäästu peamiste soovituste arvutamine | 121,88 KB. | |
| Korteris ei ole soojendamist, seetõttu ei põhjusta soojuse säästmise meetmed kasuliku arve vähenemiseni. Tehnilistel põhjustel on võimatu korteri arvestusvahendi paigaldamine võimatu. Korteris on kahekordse klaasiga akende ja klaasiga rõdu. See vähendab soojuskadu ja aitab luua korteris optimaalset mugavust. | |||
| 10438. | Metoodilised soovitused matemaatika õpikute jaoks 10-11 klassi | 75,1 KB. | |
| Autorid pakuvad baastasemele ligikaudset temaatilist planeerimist 15 tunni jooksul nädalas - geomeetria ja 25 tundi nädalas algebra. Geomeetria 10 11 on lubatud Haridusministeerium Venemaa Föderatsioon Õpikute kasutamise juhistena 10-11 klassi kasutamiseks objekti uurimise korraldamisel baasi ja profiili tasemel ... | |||
Saada oma hea töö teadmistebaasis on lihtne. Kasutage allolevat vormi
Õpilased, kraadiõppurid, noored teadlased, kes kasutavad oma õpingute teadmistebaasi ja töötavad, on teile väga tänulikud.
Postitas http://www.allebe.ru/
1. Pidurisüsteemi talitlushäired
2. Pidurisüsteemide üldine diagnoosimine
3. Pidurisüsteemide katsetamise ja meetodite tüübid ja meetodid
4. Pööramissüsteemide diagnoosimiseks mõeldud peamine seade
5. Power Rolleri tööpõhimõte
6. autode pidurisüsteemide tõhususe mõõtmine teemeetodil
7. Vaenlase diagnostika ja reguleerimise töö pidurisüsteemi
8. Pidurivedeliku asendamine
9. Pööramissüsteemi hoolduse tunnused koos pneumaatilise kviitungiga
Bibliograafia
1. Pidurisüsteemi talitlushäired
Statistika kohaselt on pidurisüsteemi rikkeid põhjustatud liiklusõnnetused 40 ... 45% tehnilistel põhjustel esinevate õnnetuste koguarvust. Esitame pidurisüsteemi peamised talitlushäired, mis ilmuvad auto toimimise käigus kulumise, vananemise ja muude tegurite ajal.
Pidurdusvõime ebapiisav pidurdusvõime vähenemine hõõrdemoefitsiendi vähenemine piduriklotside ja trummide vahel, mis kannavad hõõrde vooderdiste kulumise või lihvimise tõttu, suurendavad nende vahet.
Kõigi rataste mittekrooniline pidurdamine võib põhjustada selle põhjuseid: ebavõrdsed lüngad hõõrde vooderdiste ja piduri trumlite vahel, vooderi määrimine, rattapiduriballoonide või kolvide kandmine (hüdraulika) Täiturmehhanism), piduri või hõõrdumise vooderdiste ebaühtlane kulumine.
Pööramismehhanismide pissimine toimub siis, kui piduriklotsid piduriklotsid on lõigatud, tugevalt saastunud pidurirumlite või pidurijuhtmete rullid, purustades piduri vooderit ja segage neid kinga ja trummi vahel (ketas). Hüdraulikaseadmega autos tekib segamine siis, kui kolvid on ummistunud pidurisilindritega või kui peamise pidurisilindri kompensatsiooni avamine on ummistunud.
Piduripedaali juhtimine hüdrauliliste seadmetega sõidukite pidurdamine toimub pidurisüsteemi õhu tõttu.
Sõidukite pidurdamine vabastatud pedaali jaoks tekib pidurikraani juhtimisklapi lahtise sobivuse tõttu, mis puudub tühiku puudumine tõukur ja kolvi (hüdrauliline ratas).
Süsteemi nõrk rõhk ja õhu leke (pneumaatiline) on tingitud kompressori riba libisemisest, õhu lekkeid ühendites ja maanteel torujuhtmetes, klappide reguleerimise korrigeerimist kompressori klippidele.
2. Pidurisüsteemide üldine diagnoosimine
Pidurisüsteemide üldine diagnoos ATO, Auto-Service organisatsioonide (OA) või kontrollimisel riigi tehnilise kontrolli läbiviimisel sisaldab:
Pidurisõidukite (TC) töö- ja seisupiduri süsteemide tõhususe kontrollimise mõõtmine ning sõiduki stabiilsus tööpidurisüsteemi pidurdamisel;
Organoleptiline ja vajaduse korral pneumaatilise või pneumaatilise piduri täiturmehhanismi pneumaatilise või pneumaatilise osa tiheduse ja rataste elementide tiheduse mõõtmine.
Sõiduki pidurdustõhususe mõõdetakse pidurisüsteemide või teemeetodi katsetamiseks rullipiduri seista abil, kui sõiduki mõõtme või struktuuriliste omaduste tõttu ei saa nende näitajate juhtimist seista kontrollida.
3. Tüübid seisab ja minaravi katsetamine pidurisüsteemid
On mitu tüüpi seisake, mis kasutavad piduri omaduste mõõtmise erinevaid meetodeid ja meetodeid: staatiline võimsus, inertsiaalplatvorm ja 12 rull, elektriline rull, samuti vahendid auto aeglustuse mõõtmiseks maanteeside ajal.
Staatiline võimsus seisab Nad on rull- või platvormi seadmed, mille eesmärk on muuta ümberpööratud ratta "jaotus" ja samal ajal rakendatud jõu mõõtmist. Sellistel stendidel võib olla hüdrauliline, pneumaatiline või mehaaniline draiv. Pidurivoo mõõtmine on võimalik, kui ratas valitakse või kui seda toetatakse sujuvatele jooksurumidele. Pidurite diagnoosimise staatilise meetodi puuduseks on tulemuste ebatäpsus, mille tulemusena ei ole reaalse dünaamilise pidurdusprotsessi tingimused reprodutseeritud.
Isertsiaalse platvormi toimimise põhimõte See põhineb inertsjõudude mõõtmisel (järk-järgult ja pööratavalt liikuvatest massidest), mis tekivad auto pidurdamisel ja dünamomeetriplatvormidega rataste kontaktkohastes rataste kontaktides. Selliseid tähiseid kasutatakse mõnikord pidurisüsteemide sisendjuhtimiseks või sõidukite diagnostika sisendjuhtimiseks.
Inertsiaalsed rull-seisavad Koosneb rullidest, millel on elektrimootorist või auto mootorist, kui sõiduki sõidurattad juhtivad seista rullid ja nendest, kasutades mehaanilist ülekannet - ja ees (ori) rattad.
Pärast sõiduki paigaldamist seista, ümbermõõdu kiirus rataste reguleeritakse 50 ... 70 km / h ja järsult aeglustada, samal ajal eraldades kõik vagunid seista lülitades välja elektromagnetilised haakeseadised. Samal ajal tekib seista rullide rataste kontaktkohastes rataste kontaktides inertiajõud, vastupidi pidurijõudude vastu. Mõne aja pärast peatub auto pink trumlite ja rataste pöörlemine. Iga autoratta möödunud viisid selle aja jooksul (või trumli nurgaaegne aeglustumine) on võrdne piduriradude ja pidurijõududega.
Pidurdustee määrab seista rullide pöörlemise sagedusega, mis on kinnitatud loenduriga või nende pöörlemise kestusega, mõõdetuna stopperiga ja aeglustage nurga despometer.
Isertsiaalse rulli pinkiga rakendatud meetod loob auto pidurdamise tingimused, võimalikult lähedale reaalsele. Siiski tõttu kõrge hind seista, ebapiisava ohutuse, tööjõu intensiivsuse ja kõrge kulude ajaks vaja diagnoosimiseks vajalikud stendid on irratsionaalne diagnoosimisel ATP.
Power Roller seisab Kui siduri jõud kasutatakse rulliga, võimaldavad pidurijõudude mõõtmist selle pöörlemise ajal kiirusel 2 ... 10 km / h. Selline kiirus on valitud sellepärast, et kiirusel 13 katset suurendab rohkem kui 10 km / h märkimisväärselt suurust teavet pidurisüsteemi jõudluse kohta. Iga ratta piduri jõudu mõõdetakse selle pidurdamisega. Rattade pöörlemist teostavad elektrimootori seista rullid. Pidurijõudude määratakse reaktiivse hetkega, mis tekib mootori käigukasti staatoril rataste pidurdamisel.
Power Roller seisab lastakse saada üsna täpseid tulemusi pidurisüsteemide kontrollimiseks. Iga re-testiga suudavad nad luua tingimusi (kõigepealt rataste pöörlemiskiirusest), on absoluutselt identsed eelmiste puhul, mis on varustatud esialgse pidurdusega välise ajami täpse tööga. Lisaks mõõdetakse toiterullide testimisel nn ovaalsioone - hinnanguline pidurijõudude ühtlusest ühe käive ratta, s.o. Kogu pidurduspinda uuritakse.
Kui katsetamine toiterull seisab, kui jõud edastatakse väljastpoolt, st Piduri seistast ei ole pidurdamise füüsiline mustri katki. Pidurisüsteem peaks sissetuleva energia absorbeerima, kuigi auto ei liigu (selle kineetiline energia on null).
On veel üks oluline testitingimus - ohutus. Kõige turvalisem - teste tugevusrullide seisab, kuna kineetiline energia katse auto seista on null. Tuleb märkida, et selle omaduste kokkuvõtlik on elektriline rull-seisavad, mis on kõige optimaalsemad lahendused nii GOSTHASi poolt läbi viidud ATP kui ka diagnostilistele jaamadele.
Modern Power Roller seisab Pidurisüsteemide kontrollimiseks mitmeid parameetreid saab määrata:
Sõiduki üldised parameetrid ja pidurisüsteemi seisund: vastupidavus mitteoptiliste rataste pöörlemisele; pidurdusjõu ebatasandilisus ühe käive ratta; Mass, mis tulevad rattale; Mass tulevad teljel; pöörlevate rataste pöörlemise vastupanuvõime;
Pidurisüsteemi parameetrid: suurim piduri jõud; Pidurisüsteemi tööaeg; Teiste rataste mittevastavuse koefitsient (suhteline ebaühtlus) rataste pidurijõud; Konkreetne piduri jõud; jõupingutused juhtkonnale;
Seisupiduri parameetrid: suurim piduri jõud; Konkreetne piduri jõud; Jõupingutused juhtpaneelil.
Teave kontrolli tulemuste kohta kuvatakse digitaalse või graafilise vormi või instrumentaariumi ekraanil (teabe nooleväljundi rakendamise korral). Diagnostilisi tulemusi võib kuvada ka printimise ja salvestatud arvuti mällu andmebaasi diagnoositud autod.
4. Power Roller'i peamine seade tähistab dipidurisüsteemid Agnostation
Selliste stendi peamised komponendid on tavaliselt: kaks omavahel ühendatud rullide komplekti, mis asetatakse vastavalt auto vasakule ja paremale küljele tugi- ja tajumisseadmesse; Toitekapp; Rack; Pult; Silikamõõturi survet piduripedaalile. Sõiduk on paigaldatud katsepinkile, nii et kontrollitava telje rattad asuvad rullides.
(Püsivalt tajutav seade (joonis 1) on mõeldud autode diagnoosi telje rataste ja sunniviisilise pöörlemise asetamiseks, samuti moodustumise (pidurdusjõu andurite ja masside abil) elektriliste signaalide , proportsionaalne pidurdusjõuga ja osa iga ratta diagnoosi teljele tuleva sõiduki massist.
Joonis 1. Võrdlusseadme skeem: 1, 5, 7, 10 - rullid; 2.9 - Gear Motors; 3.8 - tüvemõõturid; 4, 11 - jälgimisrullid; 6 - raami; 12 - Massiandurid.
Võrdlus tajuv seade koosneb lahtrisse 6 kasti ristlõiget, kus kaks paari tugirullide (5, 7 ja 1, 10) paiknevad sfäärilistel iseseisvate laagrite (5, 7 ja 1, 10) omavahel ühendatud sõiduahela poolt.
Rullid 1 ja 5 on ühendatud kurtide sidurite kaudu, millel on koaksiaalkäigukastid 2 ja 9. Igal rullpaaril on autonoomne autonoomne autonoomne autonoomne autonoomne autonoomnega ühendatud elektrimootoriga. 13 kW. Elektrimootor Käigukasti juhib rulli liikumise ja säilitab pideva pöörlemiskiiruse. Rullide komplekti draivimootorid saab aktiveerida kaugjuhtimispuldi abil, tänu sellele, milliseid mõõtmismenetlusi saab autolt tarnida või kasutada integreeritud automaatse kahe asendi lüliti.
Reeglina on piduristes planeedi käigukastid, millel on kõrge käiguvahetuse suhted (32 ... 34), mis võimaldab saada rullide väikest pöörlemiskiirust. AC-mootor juhib juhtiva rulli liikumist hammastatud ülekande abil. Käigukastide tagumised otsad on paigaldatud sfäärilistes laagrites, samas kui mootori käigukastid on tasakaalus. Korpus mootori käigukastid Tensomeetrilised andurid 3 ja 8 on seotud.
Tugirullide vahel on paigaldatud vabalt pöörlevad vedruga koormatud rajad 4 ja 11, millel on kaks andurit: andur auto juuresolekul tugirullides, mis jälgimisrulli langetamisel annab vastava signaali; Ratta pöörlemise jälgimise andur, silmapaistvad signaalid, kui rattad pöörlevad diagnoositud TC jaoks
Praegu mõned tootjad, nagu CARTEC, ei ole paigaldatud nende seisab jälgimisrullide. Sellised pingid on varustatud anduritega, mis pakuvad auto juuresolekul kontaktivaba määramise seista rullides. Andurid määravad auto olemasolu seista ja sõiduki õige asend seista rullide (pikisuunalises ja põiksuunas) annab signaali käivitamise mootorid.
Raami 6 allosas allosas tugirullide all on neli massi andurit 12, millel on otstes peatused, et seadistada ja kinnitada toetusseade sihtasutusse (või raami all).
Vibratsiooni tasumiseks pannakse tugi tajuv seadme raami kummist vooder. Pöörade pinnad toiteplaadirullide valmistatakse forreeritud terasest welcoxiga, mis tagab konstantse 16 siduri koefitsiendi rullide kulumisena - või on kaetud basalt, betoon ja muud materjalid hea haarde rehvid Rattastega rullide parema siduri jaoks valmistatakse mõlemad rullid plii teel ja nende vaheline kaugus on teha võimatuks auto pidurdamise eest. Tehke auto seista pärast ajami telje pidurite kontrollimist, mis on varustatud rullide vahel asuvate käigukastide või -tõstukite reaktiivse pöördemomendi abil. Mõnikord on selleks üks rullidest (lahkumise poolel) pakuvad seadet, mis võimaldab teil pöörata ainult ühel viisil.
Piduri seisavad on varustatud spetsiaalsete seadmetega, mis takistavad rullide agregaatide algust juhul, kui üks või mõlemad rattad on blokeeritud. Seega on auto ja rehvid rullide kahjustamise eest kaitstud. Run on blokeeritud ka juhul, kui vajutate piduripedaali enne tähtaega, liiga suurt vastupidavust ühe või mõlema ratta rullide pöörlemisse, kinnitades piduriklotsid jne.
5. Power Roller'i tööpõhimõte
Auto sissepääsu juures piduri seista mass telje mõõdetakse, kui on olemas kaalumisseadme; Selle puudumise korral võib telje massi manustada teisest seistast, näiteks seista amortisaatorite kontrollimiseks. Kui auto on paigaldatud katsepinkile, siis jälgimisrullid 4 pressitud ja edastada stend signaali tuues seisva tegevuse; Mõlemad jälgimisrullid tuleb seista sisse lülitada. Tulevikus kasutatakse jälgimisrullid rehvi libisemise määramiseks jooksvate rullide suhtes ja annab signaali mootori käigukastide väljalülitamiseks libisemise ajal.
Põhimõte seisab seisab põhineb transformeerimisel tüve-spector andurid reaktiivsete hetkede pidurdusjõudude pidurdamisel sõiduki rattad, samuti raskusastme telje auto, mis toimib rullil agregaadid analoogse elektrilistesse signaalidesse. Pisut ratast juhib rullid. Pidurdumise ajal tekib tekib pidurdusjõudude suurust tasakaalustavalt peatatud mootori käigukastile. Käigukasti mootorit pööratakse pidurdusjõuga võrdeliselt nurga all. Reaktiivne hetk, mis toimub käiguvahetuse pöörlemise ajal, peetakse tüve gabariit andurid 3 ja 8 (vt joonis 1), mille üks ots on fikseeritud mootori käigukastide 2 ja 9 käpadele ja teisele raamile 6.
Piduri painutusrullide pöörlemiskiirust võrreldakse jälgimisrullide pöörlemiskiirusel. Jälgimisrullide pöörlemiskiiruse ja pidurite seista rullide pöörlemiskiiruse erinevus määrab libisemise suuruse. Sellise seisakide libisemisega lülitage automaatselt välja pidurdusrullide draiv 17 seista, mis kaitseb rehve kahjustuste eest. Tavaliselt, kui kontrollitakse, takistatakse seda, kuni vähemalt üks jälgimisrullid märgatakse libisemise normatiivsete väärtuste ületamisel ja ei lülitu draivimootorid välja. Kui üks ratas saavutatakse paigaldatud libisemispiiriga ühe rattaga, on mõlemad tugirull lahti ühendatud. Maksimaalne mõõdetud väärtus on kirjutatud maksimaalse pidurijõuna.
Piduripedaali jõupingutuste kontrollimine võimaldab teil kindlaks määrata mitte ainult normaliseeritud väärtusi, vaid ka pidurisüsteemi vaakumvõimendi jõudlust ja võrrelge ratta pidurdusmehhanismide töörežiime.
Signaalid tüve takisti andurid tulevad arvutisse, kus neid automaatselt töödelda spetsiaalse programmiga. Pidurijõudude mõõtmiste ja auto massi mõõtmiste tulemuste kohaselt arvutatakse pidurijõudude aksiaal- ja täiendamatapiduskehu ning pidurijõudude ühtlustamata. Mõõtmistulemused ja arvutatud väärtused on esitatud monitori graafilises ja digitaalsel kujul, seejärel prindimetal prindib mõõtmisprotokolli.
Kaaluge sõiduauto piduri parameetrite mõõtmise tehnoloogilist järjestust seisab sõiduauto näitel. 1. Auto on paigaldatud piduri süsteemide diagnoosimiseks (joonis 2).
Joonis 2. Autode asend piduri seista: 1 - diagnoositud auto; 2 - armatuurlaud; 3 - kabiini rullid; 4 - Mõõtmise andur Piduripedaali vajutamine.
Enne tc piduri süsteemide tehnilise seisukorra kontrollimist piduri seista on vajalik:
Kontrollige õhurõhku TC rehvides ja vajadusel viia see normaalseks;
Kontrollige TC bussi, mis puudub kahju ja lagunemise turvise, mis võib põhjustada hävitamise rehvi pidurdamisel seista;
Kontrollige sõiduki rataste ja veenduge, et nende manuse usaldusväärsus, samuti puuduvad võõrkehade puudumine kaherattaliste vahel;
Hinnake katse telje piduri mehhanismide elementide kuumutamise astet organoleptilise meetodi abil (piduri mehhanismide elementide temperatuur ei tohiks olla kõrgem kui 100 ° C). Kontrolli optimaalseks võib pidada tingimused, mille kohaselt pidurrumlite (kettad) kuumutamine võimaldab teil hoida isiku kaitsmata käe otseses kontaktis selle elemendiga pikka aega (see järgib sellist hindamist, jälgides ettevaatusabinõusid põletuste vältimiseks) ;
Paigaldage piduripedaalile, seadmele (vajutades Force Sensor), et kontrollida pidurisüsteemide parameetreid, kui määratud jõud käivitub;
Märgrattade läbiviimine pidurimismehhanismide niiskuse eemaldamiseks viiakse läbi piduripedaali korduva vajutamisega.
2. Sisaldab kabiini elektrimootoreid ja mõõta pidurijõudu (ilma piduripedaali pressimiseta), mis on põhjustatud rataste veeretuse resistentsusest. See suurus on proportsionaalne vertikaalse koormusega ratta ja sõiduautode jaoks on tavaliselt 49 ... 196 N.
Kui ratta vastupanujõud on suurem kui 294 ... 392 N, tähendab see, et ratas inhibeeritakse, seega tuleb selle võimaliku põhjuse avastada (väike vahe piduriklotside ja trumli vahel (ketas) , segades kolvid töötavate silindrite, rattarubi laagrite ebanormaalse pingutamise jne).
3. Sujuvalt vajutage piduripedaali pingutusega mitte rohkem kui 392 N ja eemaldage tunnistuse (ühe telje rataste lubatud vaheseinte erinevus ei tohiks ületada 50%).
4. Sujuvalt vajutage piduripedaali, et luua 490 ... 784 N iga ratta ja hooldab see konstantse 30 ... 40 s. Piduri diagnostika rikke rull
Kui pidurdusjõudude tunnistuse erinevus on väga suur, tähendab see, et niiskus sain pidurdusmehhanismidesse. Seda saab tavaliselt pesemise seista sisestatud autode kontrollimisel täheldada. Juhul kui kahe tunnistuse erinevus säilitatakse ja pärast pidurite kuumutamist selgitatakse see ühe järgmistest põhjustest: piduriklotsade pind on kristalliseerumise ja tõsise lihvimise ja madala hõõrdumise koefitsiendiga Kinnitatakse kogu katsetsükli sooritamisel, kui pidurdusjõud on väike suureneb vaatamata oluliste jõupingutuste esinemisele piduripedaalile; Tööballoonide kolvid kasvatatakse täielikult esialgses asendis, seda kinnitab asjaolu, et 19 suurendades jõupingutusi piduripedaalides ei põhjusta ratta piduri jõudu.
Et selgitada võimalikku talitlushäireid, on vaja kontrollida ratta piduri mehhanismi. Kui ühe või kahe ratta pidurdusjõudude katsetamise protsessis kõikuvad (196 ... 392 h võnkumiste amplituud), millel on piduripedaali pressimine (147 ... 196 h), näitab see seda Küsimused elliparaalsuse või intiimsuse trumlite ja rataste, deformatsioon kettad, vale rehvi profiili. Tavaliselt eeldatakse, et ellipants või indeptsioon on pidurdusjõu iga 98 tunni iga 98 h võnkumise puhul umbes 0,1 mm.
5. Kui piduripedaal on vabastatud, tagastatakse mõõtenooled (numbrid) veeretakistuse loodud minimaalsetele väärtustele. Tagasipöördensaarte (numbrite) kiirus ja ühtlus hindab rataste samaaegset ja kvaliteeti.
6. Suurendage piduripedaali pressimise jõudu 49 h-ni, salvestatakse piduri jõud, kuni ratta blokeerimine on saavutatud. Nende testide käigus hinnatakse pidurite ühtsust.
Kui mõlema ratta pidurdusjõudude suurenemine on väiksem (näiteks pedaali 98 h jõupingutustega, on rataste pidurdusjõud 833 N-ni ja suurenemisega kuni 196 h, see suureneb 1176 N-ni Selle asemel, 1568 ... 1666 N), siis tähendab see, et autole rakendatud hõõrdelaevade tüüp või ei sobi ülemäära kõrge kõvaduse või nende pinnale kristalliseerunud või grillitud töötamise ajal.
Kui pidurdusjõudude puhul on kiire suurenemine (näiteks pedaali 98 h jõupingutustega, on rataste pidurdusjõud 833 N-ni ja suurenemiseni kuni 196 h suureneb peaaegu 1960 n), Siis on pidurid kalduvus enese blokeerimiseks. See on eriti ohtlik niiske tee pidurdamisel. Suurenenud kalduvus enesekindlaks võib olla tingitud hõõrde vooderdiste kasutamisest liiga pehmetest materjalidest.
Trummelpiduris võib sarnane nähtus tekkida, kui padjad on valesti reguleeritud. Lisaks autod, millel on piduri võimendi, suundumus blokeerida rattad võivad olla tingitud vale töövõimendi võimendi.
Pidurijõudude, mis on loodud ratastel ajal nende blokeerimine on otsustava tähtsusega hinnata pidurid. Siiski tuleb meeles pidada, et piduri jõu suurus, mille rattad blokeeritakse, määratakse teguritega, millest paljud ei sõltu sõiduki pidurisüsteemi tehnilisest seisundist, näiteks 20 kaalumise ratta kohta; Rehvid, kulumine ja turvise muster.
7. Sarnaselt esirataste pidurite kontrollimisega, tagumiste rataste pidurite kontrollimine.
8. Pidurijõudude kokkuvõtmine iga ratta kohta määrata konkreetse pidurijõu, mis peaks olema vähemalt 50% kogu sõidukist. Sel juhul kontrollitakse konkreetset pidurijõu esi- ja tagatelje jaoks eraldi.
Käsiraamatu (parkimise) pidurite kontrollimiseks on vaja parkimispiduri hooba järk-järgult liikuda enne rataste blokeerimist. See toiming tuleks läbi viia eriti hoolikalt, kuna rataste blokeerimise ajal võib auto, mida mitteoptiliste esipaneelide poolt säilitada, liikuda pinkist jerk tagasi, nii et testide ajal 2 m kaugusel 2 m Autost ei tohiks olla inimesi.
Käsitsi pidurihoova liigutamisega loendage norskamismehhanismi klikkide arv, et kontrollida ajami reguleerimise õigsust. Kontrollige samal ajal pidurdamise tõhusust ja ajami ühtsust. Tehniliselt, töökindel manuaalne pidur peaks tagama pidurijõudude mõlema rattal, mille summa ei tohiks olla väiksem kui 16% kogumassist auto.
Samas järjestuses tehakse pneumaatilise kviitungiga pidurisüsteemide parameetrite mõõtmised. Pneumaatilises süsteemis paigaldatakse rõhuandur. Selleks on vaja pistikust eemaldada pneumaatilise pidurisüsteemi toiteahela juhtimisanduri ventiili ja kruvige rõhuanduri oma kohale.
Pidurdusprotsessi dünaamikat võib täheldada graafilises tõlgenduses. Joonisel fig 3 on näidatud pidurdusjõudude (vertikaalselt) sõltuvus piduripedaali keermest (horisontaalselt) vasakule (ülemisse kõverale) ja parempoolse ratta jaoks (alumine kõver).
Joonis fig 3, B näitab pidurijõudude erinevuse muutust (vertikaalselt) vasaku ja parema rataste pidurdamisel. Võib näha, et pidurdus kõver läheb kaugemale stabiilsuse koridori piiridest ja see on vastuvõetamatu ja tunnistab ebastabiilse pidurdamise eest.
Graafiku muutmise jälgimine, diagnostikaoperaator võib teha järelduse konkreetse pidurisüsteemi talitlushäire kohta, näiteks pidurdusjõudude erinevusega või lainekuju muutmise iseloomuga.
Joonis 3. Pidurdumisprotsessi dünaamika graafiline kuvamine: A - pidurijõudude muutus sõltuvalt piduripedaali vajutamise pingutusest; b - vasak- ja paremate rataste pidurijõudude erinevuse erinevus; 1 - stabiilsuse koridori laius.
6. Pidurisüsteemi tõhususe meetmedsõiduki teemeetod
Auto pidurisüsteemi tõhusust saab kontrollida spetsiaalsete arvestite - desperomeetrite või töölaua abil. Sellised meetrites kasutatakse piduri seista puudumisel ja väliste tingimuste puudumisel või kui sõidukit (näiteks mootorrataste) kontrollida on võimatu.
Kui kasutate TC deslerometer'i ringikujulises olekus, kiirendavad ja dramaatiliselt aeglustavad ja aeglustavad dramaatiliselt ühekordse jalapiduripedaaliini. Desseromeetri põhimõte on määrata seadme liikuva inertsiaalse massi liikumise tee selle keha suhtes, mis on fikseeritud autoga. See liikumine toimub inertstugevuse all auto pidurdamisel proportsionaalselt selle aeglustumisega. Tõlgelt liikuv koormus, pendli, vedelate või kiirendussensor ja arvesti - lüliti, skaalal, signaallamp, ise inspektor, komposter jne. Õhk, kevadel) ja mõõtmiste lihtsustamiseks - mehhanism, mis lukustab maksimaalse aeglustumise.
Kõige laialdasemalt jaotatud meetri kauguse tõhususe pidurisüsteemide "efekti" (joonis 4).
Joonis 4. Pidurisüsteemide mõju tõhususemõõturi üldine vaade "efekti" (Venemaa): 1 - pistikupesa printeri ühendamiseks (arvuti); 2 - toitekaabli pistik; 3 - püügikoormus andur kaabel pistik; 4 - armatuurlaud; 5 - imi tass; 6 - "Tühista" nupp; 7 - "Vali" nuppu; 8 - klamber; 9 - näitaja; 10 - klambri pliiats; 11 - Toitenupp "On"; 12 - "Sisesta" nuppu; 13 - püügikoormus andur; 14 - Printeri kaabli pistik; 15 - pistik sigareti kergema pesaga ühendamiseks; 16 - Printeri toitenupp; 17 - Printer.
Seade määrab paigaldatud aeglustuse, pedaali pressimise jõu, pidurdusraja pikkus, pidurisüsteemi reageerimisaja, piduriskiiruse ja sõiduki lineaarse kõrvalekalde jõud ja tekitab ka ümberpööratsiooni Piduri tee kiirus reaalsele esialgsele pidurdusele.
Pidurisüsteemi tõhususe kontrollimiseks on seade kinnitatud auto paremale või vasakule uksele. Seadme noole noolel peab olema kontrollitud auto liikumissuundiga. Piduripedaalile paigaldatakse jõu andur. Andurikaabel on ühendatud seadme plokiga sõltuvalt kasutatavast allikast (auto pardal oleva võrgu või laetav akuSisaldab instrumentides). Seadmel on võimalus printida teavet spetsiaalse kaabli abil.
7. Elementaarne diagnostika ja reguleeriminepidurisüsteemi töö
Organoleptiline juhtimine. Organoleptiline kontroll hõlmab piduri draivielementide tehnilise seisukorra reguleerimist ja rataste piduri mehhanisme.
Pidurielementide tehnilise seisukorra jälgimisel viiakse läbi järgmised kontrollid:
Kahju kontrollimine;
Hinnang pneumaatilise piduri draivi täitmise kohta;
Õige toimimise kontrollimine.
TC piduri draivi elemente peetakse: \\ t
Juuresolekul torujuhtme kontakti ei ole ette nähtud sõiduki elementide TCS ja muud defektid;
Seisupiduri süsteemi hoova lukustusseade (käepide) võimetus;
Pneumaatilise või pneumaatilise hüdraulilise piduriserõhumõõturi mittetöötav seisund;
Hüdraulilise piduri täiturmehhanismi tiheduse häired (piduri vedeliku lekke olemasolu);
Ebausaldusväärne kinnitus;
Reageerimissüsteem signalisatsiooni ja juhtimise juhtimise pidurisüsteemide vähem kui neli tsüklit täieliku käivitamise tööpidurisüsteemi;
Pidurivooliku voolikute turse surve all, välivate voolikute kahjustamine, nende tugevduse kihi saavutamine;
Pidurisüsteemide töötamise süsteemi mittetöötav seisund;
Juuresolekul hotelle või külgmise nihke piduripedaali;
Haagise automaatse erakorralise pidurdamise funktsiooni kasutuskõlbmatu seisund;
Ehituse või paigaldamise puudumine ilma koordineerimiseta tootja või muu volitatud organisatsiooniga kooskõlastamata täiendavad elemendid Pidurivedu.
Rattade pidurimehhanismide elementide tehnilise seisukorra jälgimisel järgmised kontrollid :
Kahjustuste kontroll (praod, jääk deformatsioon ja muud defektid);
Kinnitusvõime hindamine;
Lihtsuse kontrollimine.
TC-rataste pidurimehhanismide elemente peetakse: \\ t
Saasteainete olemasolu takistavad kontrolli;
Jääkide deformatsiooni, pragude ja muude defektide olemasolu;
Pidurimismehhanismi semimine; - ebausaldusväärne arestimine;
Veselicle-pakutava sõiduki või paigaldamise puudumine ilma tootja või teise pidurimismehhanismide täiendavate elementide volitatud organisatsiooniga.
Auto pidurisüsteemi elementaarse diagnoosimisega määratakse see: piduripedaali vaba kursus; Lüngad hõõrde vooderdiste ja rataste pidurirumlite vahel; rõhk pidurisüsteemis; piduri mehhanismide tööaeg; Pidurikatte vardade väljalaskeava suurus; Vahemaa surveregulaatori hoova otsast kehapruunisse; Vaakumvõimendi jõudlus.
Vaba liikumine pedaali piduri hüdraulika rattad määratakse spetsiaalse või tavapärase joone abil. Line lõpp on puhata põrandal ja keskosas on paigaldatud pedaali vastas. Vajutage kätt pedaalile märgatavale suurenemisele vastupanuvõimele pedaalist, kui see liigub. Rida ulatuses salvestab pedaali vaba liikumine.
Pidurikatte pedaali vaba käigu kontroll Soovitatav on hoida uut autot läbi 2 ... 3000 km ja tulevikus iga 20 000 km järel. Enamikus sõiduautode kaubamärkides on hea pidurisüsteem, vaba liikumise suurus sõidupedaalis on 3 ... 6 mm kaugusel. Kui vaba töötamine ei vasta normile, tehakse korrigeerimine tõukejõudu muutmisega.
Veoautode ja busside jaoks saab piduripedaali täielikku ja vaba liikumist kontrollida ja reguleerida.
Vaakumvõimendi jõudlus Pidurisüsteemi kontrollitakse järgmises järjestuses. Vajutage rattapiduripedaali ligikaudu kuni selle täieliku liikumise keskele, kui mootor ei tööta, mootor käivitatakse ja kui piduritungipedaal liigub allapoole, siis vaakumvõimendi on hea.
Rõhuregulaatori diagnoosimisel on auto paigaldatud liftile või inspekteerimisele. Puhastage koo-kontrolleri ettevaatlikult ja eemaldage kaitsekott. Klõpsake järsult piduriketiseda pedaalil. Töörõhu regulaatoriga liigub kolvi väljaulatuv osa eluaseme suhtes võrreldes.
Pidurisüsteemi säilitamiseks töökorras töökorras, perioodiliselt enne väljumist, on vaja kontrollida tase pidurivedeliku tankid, teostada kohandamise operatsioone.
Sellel iga 10 000 km järel kontrollib läbisõit piduri vedeliku taset paagis (mahutites), mis kaane paigaldamisel peaks jõudma täitekala alumise serva. Väärtus peaks olema vedelik ainult brändi, mida kasutati enne; Erinevate kaubamärkide vedelike segamine on vastuvõetamatu. Kui paak on varustatud vedeliku juhtseadmega, siis on vaja kontrollida anduri toimimist Kontrollimise ajal peab mootori süüte süsteem olema lubatud.
Pidurivedeliku taseme vähendamine paagis näitab selle võimalikku lekkeid. Olles leidnud leke, te peaksite kogu süsteemi hoolikalt uurima ja vajaduse korral tegema sidemeid sidemete peatamiseks või silindriballooni silindrite asendamisel.
Pedaali vaba käigu suurenemine, selle ebaõnnestumine ja välimus teise või kolmanda elastsuse tunnete tunnete pedaalist näitavad õhu juuresolekul pidurisüsteemis.
Õhu eemaldamine Pidurisüsteemi pumpamiseks ja siduriseadmele pumpamiseks. Pidurisüsteemi pumpamise järjekord iga auto jaoks on individuaalne, kuid konkreetsete soovituste puudumisel võib see olla järgmine. Autode jaoks, millel on eesmised ja tagumised kontuurid, kõigepealt esirataste kontuur ja seejärel tagumine, alustades iga kontuuri ratast, kõige kaugema peamise pidurisilinder. Diagonaalsete kontuuride sõidukite puhul, pidevalt pump välja: vasakule taga, paremale, paremale tagumisele ja vasakule esirattad.
8. Pidurivedeliku vahetamine
Pärast 2-aastast toimimist või iga 45 tuhande kilomeetri iga läbisõit asendab piduri vedeliku. Kui pidurisüsteemi kasutatakse koos raske koormusega, näiteks sõites läbi mägine ala või kõrge niiskusega, pidurivedelikku tuleb muuta üks kord aastas. Gigroskoopiline piduri vedelik, st See on võimeline õhust absorbeerima veemolekule. Imendumine toimub piduri voolikute ja paagi pinnaga vastavalt kummi ja plastile, mis on õhu molekulidele läbilaskvad. Suurenenud veesisaldus pidurivedelikes toob kaasa selle keemistemperatuuri olulise vähenemise ning pidurisüsteemi elementide korrosioon. Selle tulemusena tekib pidurisüsteemi kahjustus ja selle toimimine on oluliselt halvenenud ja aasta kuumas hooajal võib põhjustada vee aurustumise tõttu õhu liiklusummikute moodustumist.
Selleks, et asendada pidurivedelik hüdraulikasüsteemi süsteem, õhk ei kuulu järgmiste eeskirjade järgimine:
Järgige samasuguse toimingu protseduuri kui siduri pumpamisel, kuid kasutage lõpusvooluga voolikut, mis langeb piduri vedelikuga anumasse;
Piduripedaali vajutamine, vana pidurivedeliku pumpamine, kuni Uus pidurivedelik ei ilmu toru; Pärast seda on piduripedaali kaks täisrakendit ja hoides seda maha, paigaldamine on puhastatud; Pumpimise ajal jälgivad nad paagis vedeliku taset ja vedelik on maksimaalsele tasemele õigeaegselt raputatud; Korrake seda operatsiooni iga töösilinder samas järjekorras nagu pumpamise ajal;
Täitke paak maksimaalsele tasemele ja kontrollige pidurite töö, kui auto liigub.
Hüdrauliliste piduri süsteemide pumpamiseks võib kasutada spetsiaalseid seadmeid.
Paigaldamise põhimõte (joonis 5) seisneb selles, et elastse sisemembraani abil eraldab see kõigepealt piduri vedeliku õhust, vältides seeläbi nende segamise ja moodustumise ohtliku emulsiooni ja seejärel rõhu all 20 MPa-s eemaldab see vana piduri vedeliku, asendades selle uue ja eemaldades õhu süsteemi.
Joonis 5. Välimus Paigaldised piduri vedeliku asendamiseks.
Paigaldamine suure adapterid sisaldavad põhipakett võib asendada piduri vedeliku nii sõiduautode ja kergetes veoautodes.
9. Hooldus Omadused Tor.mootori süsteem koos pneumaatilise juhtiga
Viimaste aastate ehitamise pneumaatiliste toimivate piduri süsteemide puhul toodetakse lõhe reguleerimist 28 laienemise rusika asendi muutmisega, mis saavutatakse reguleerimishoova ussi pööramisega. Vajadus tühje reguleerimiseks määratakse piduri kambri varra pikkus, mis ei tohiks ületada 35 mm eesmise ja 40 mm tagapidurite jaoks. Pidurikeskambri vardade erinevus ühel teljel ei tohi ületada 5 mm.
Rõivaste kontrollimiseks peate klõpsama piduripedaalile, kuni see peatub, toitmine suruõhu piduriskambrisse ja mõõta insulti. Kui piduri kambri insult on normatiivsete väärtuste ületamine, peate reguleerima, keerates kuuskantkangi pearaaperitõstuki vastupäeva (joonis 6) (joonis 6).
Joonis 6. Reguleerimishoova kava: 1 - eluase; 2 - tõukur; 3 - liikuvad poolpüstolid; 4 - kevad; 5 - pistik; 6 - ussi uss; 7 - tihendusrõngas.
Kaasaegses autodes ja bussides säilitavad pidev lõhe padi hõõrdepadjade ja ketaspiduri mehhanismi vahel, mis on varustatud seadmega piduriklotside jaoks automaatselt kompenseerimiseks. Piduri vooderdiste ja pidurikettade kulumise aste tuleb perioodiliselt kontrollida. Kontrollide sagedus sõltub sõiduki käitamise intensiivsusest, kuid see peaks toimuma vähemalt kord kolme kuu jooksul (kui ei ole ette nähtud kulumise andurite piiramise korral).
Uue piduriklotsi C (joonis 7) kogupaksus peaks olema 30 mm ja selle paksus D on 9 mm. Kui hõõrdekatte paksus on vähemalt ühes kohas alla 2 mm, siis piduriplokk on asendamisel. Lubatud on hõõrdematerjali ebaoluline värvimine vooder servadel.
Joonis 7. Lubatud mõõtmed Pidurisüsteemi pneumaatilise draiviga sõidukite plaat ja plokid: a - piduriketta paksus; C - Uue piduriklotside paksuse kogupaksus; D - piduriklotside aluse paksus; E - piduri vooderi paksus; E on piduripadja minimaalne paksus, sealhulgas aluse paksus.
Piduriketta A paksus mõõdetakse õhemas; Uue ketta jaoks on see 45 mm. Pidurikettami minimaalne paksus, mille juures see asendamisel on 37 mm. Pidurikatte minimaalne paksus, kaasa arvatud aluse F, 11 mm paksus; Selle suuruse saavutamisel asendatakse piduriplokk.
Piduri ketas voolu tundub asjakohane ainult erandjuhtudel - suurendada hõõrdevooliku tööpinda tööprotsessis, näiteks kui piduri ketta tööpinnal on palju kriimustusi. Minimaalne ketta paksus pärast kanali peaks olema vähemalt 39 mm.
Piduriklotside asendamisel ja vajaduse korral saab kontrollida automaatse kliirensi reguleerimise mehhanismi kontrollimist (joonis fig 8, a).
Selleks, eemaldage ratast, nihutas liikuva sulguri oma juhendites TC sisekülje suunas, vajutage peatustest sisemise piduriploki 5.
Joonis 8. Kontrollige (a) ja reguleerimise (b) mehhanismi automaatse ketaspiduri mehhanismide automaatse kohandamise mehhanismi pidurisüsteemi pneumaatilise ajamiga: 1 - liikuv klamber; 2 - keele pistik; 3 - adapter; 4 - regulaator; 5 - piduriklots; 6 - sond; 7 - võti.
Kliirens mõõdetakse piduriklotside ja peatuste aluse vahel (see peab olema 0,6 ... 1,1 mm kaugusel). Lõhe on suurem või vähem määratletud, võib viidata automaatse kliirensi korrigeerimise mehhanismi talitlushäirele ja selle tulemuslikkust tuleks kontrollida. Selleks, regulaatorist eemaldatakse regulaatorist spetsiaalne keelepistik 2. Võti pannakse adapterile 3 ja pöörates adapter vastupäeva, keerake regulaatorit 4 kahe või kolme klõpsuga (Zazoni suunas suureneb). Vajutage TC piduripedaali 5-10 korda (rõhul umbes 0,2 MPa). Sellisel juhul, kui automaatne reguleerimismehhanism töötab, peab mutrivõti pöörlema \u200b\u200bveidi päripäeva. Iga järgmise klõpsuga pedaalil väheneb nurk, millele võti pöörleb.
Kui võti ei pöörata üldse, lülitab see ainult siis, kui piduripedaali peatatakse esimest korda pedaali all, kuid seejärel naaseb tagasi, automaatse kliirensi reguleerimise mehhanism on vigane ja mobiilse piduripiduri vahetamine asendatakse.
Surveregulaator kompressorit reguleeritakse algus õhuvarustuse kompressori keerates korki rõhuregulaatori kork ja kompressori lahtiühendamine süsteemist valmistatakse tihenditega (tihendi paksuse suurenemisega) Sulgemise rõhk väheneb ja väheneb vähenemine). Regulatsiooni reageerimisrõhu väärtus: 0,6 MPa - sisselülitamine; 0,70 ... 0,74 mPa - seiskamine.
Turvaventiili reguleeritakse kruvi fikseeritud kruvi, rõhk 0,90 ... 0,95 MPa
Autopidurite pneumaatilise draivi hooldamisel on esiteks vaja jälgida süsteemi kui terviku ja selle individuaalsete elementide tihedust. Erilist tähelepanu pööratakse torujuhtmete ja paindlike voolikute ühenduste tihedusele ja vooliku kinnituse kohtades, kuna see on siin, et kokkusurutud õhu lekkeid tekivad. Tõsise õhu lekke kohad saab määrata kõrva ja nõrga lekke kohtade kohad - seebimulsiooniga.
Õhu leke torujuhtmete ühendused kõrvaldatakse sukapidaja poolt teatud punkti või asendamise üksikute ühenduste. Kui leke ei kõrvaldata pärast pingutamist, siis tuleb asendada kummist tihendusrõngad.
Tiheduse kontroll tuleb läbi viia nimirrves pneumaatilises vastuvõtus 60 MPa, suruõhu tarbijad kaasatud ja mitte-töökompressor. Nimilõhk õhupallide surve langus ei tohiks ületada 0,03 MPa 30 minutit, vaba asendiga draivikontrolli ja 15 minutit kaasasoleva.
Kaamerate hooldamine ja hooldus kevadisenergia akudega on perioodiline kontroll, puhastamine mustusest, pidurikatte tiheduse ja töö kontrollimisega, kinnitades kinnitusmutrid.
Sprike-pneumaatiliste pidurikatte kontrollimine tiheduse jaoks viiakse läbi suruõhu juuresolekul hädaolukorra või seisupiduri ja tagumise käru piduriklotside ahela juuresolekul.
Pneumaatilise piduri täiturmehhanismil on rõhuregulaator koos suruõhu adsorptsiooni kuivatiga. Air kasutatavate adsorbendid (spetsiaalsed granuleeritud ained). Kuivatusaja normaalne toimimine on tagatud, kui 50% õhu sissepritserežiimis toimib ja ülejäänud 50% ajast on regenereerimine, adsorbendi puhastamise protsess kuiva õhuga regenereerimisvastuvõtja puhastamiseks. Seetõttu on desifikaatori tõhusaks toimimiseks vaja jälgida pneumaatilise täiturmehhanismi tihedust, mis ei võimalda lekkeid ületavaid piiranguid ületavaid lekkeid. Parandatud õhukuivati \u200b\u200bfiltrielemendi (kassett) asendamine on vajalik vastavalt vajadusele kondensaadi olemasolu pneumaatilistes süsteemide vastuvõtjates. Sõltuvalt töötingimustest ja õhu aktseptori seadmete tehnilisest seisundist võib asendussagedus olla üks kuni kaks aastat.
Bibliograafia
Loeng №5 "Diagnostation ja et pidurisüsteem" on esitatud 2. osa loengute distsipliini "tehniline operatsioon autode" ja välja töötatud õpilastele erialade 1-37 01 06 Tehniline töö autode (suundades) ja 1- 37 01 07 Täistööajaga autoteenindus ja koolituse vastavusvormid.
Postitatud Allbest.ru.
Sarnased dokumendid
Pidurisüsteemi seade hüdraulilise draivi: eesmärk, tüübid, operatsioonipõhimõte. Pidurisüsteemi jõudluse pakkumine: hooldus, remont; võimalikud talitlushäired; Diagnostika ja kohandamise töö korraldamine.
atesteerimise töö, lisatud 05/07/2011
Peamised tüüpi auto pidurisüsteemide ja nende omadused. VAZ-2110 auto pidurisüsteemi eesmärk ja seade. Võimalikud pidurisüsteemi talitlushäired, nende põhjused ja võimalused kõrvaldamiseks. Ohutus ja keskkonnakaitse.
kursuse töö, lisas 01/20/2016
Eesmärk, üldine auto pidurisüsteem. Nõuded piduri mehhanism ja juhtimine, nende tüübid. Turvameetmed piduri vedeliku suhtes. Pidurisüsteemides kasutatavad materjalid. Hüdraulika töösüsteemi toimimise põhimõte.
uurimine, lisatud 08.05.2015
Pidurisüsteemi komponendid traktorite süsteemi. Piduri mehhanismide kirjeldus pneumaatilise ajamiga. Üldised omadused MTZ-80 traktorite ja MTZ-82 piduri pneumaatiline süsteem. Piduriklikuraane reguleerimine. Pidurisüsteemide talitlushäired, kuidas kõrvaldada.
kursuste lisatud 20.10.2009
Seade ja autopidurisüsteemi toimimise põhimõte VAZ 2109. Regulatiivsed dokumendid, mis reguleerivad nende mehhanismide tõhususe parameetrite väärtust. Pidurisüsteemide diagnoosimise kord, seista ja töötlemise tulemuste kasutamise reeglid.
kursuste, lisatud 02.06.2013
Seade ja auto pidurisüsteemi kasutamise põhimõte. Toimingupõhimõte ja peamine konstruktiivsed omadused Pidurisüsteemide töötavad. Pidurdamise ja sõiduki stabiilsuse tõhusus. Käivitage tööpidurisüsteem.
kursuste, lisatud 13.10.2014
Mõlema piduripadjade asendamine. Girling ja Bendix pidurisüsteemi elemendid. Piduri soovitused uute piduriklotsidega autojuhtidele. Veaotsing Pidurisadul ja pidurisilinder kolvid, tervisekontroll.
abstraktne, lisatud 05/26/2009
Ideaalsete ja maksimaalse pidurdusmomentide arvutamine. Konkreetsete pidurijõudude jaotamise diagrammi loomine. Auto pidurite kvaliteedi kontrollimine rahvusvaheliste reguleerivate dokumentide täitmiseks. Drumin piduri mehhanismide projekt arvutamine.
kursuse töö, lisas 04/05/2013
Auto pidurisüsteemi parameetrite arvutamine. Pidurijõudude jaotuskoefitsiente piki telgesid. Rattapiduri piduri vooderdiste kogupindala. Hõõrdematerjali konkreetne lubatud hõõrdumine. Piduriklotside kogu nurk.
uurimine, lisatud 14.04.2009
Metroloogiliste mõõtmiste roll autotööstuses. Sulgude, rattapiduriballoonide ja pidurijõu regulaatorite testid, peamised piduriballoonid ilma vaakumvõimenditeta, hüdraulilised võimendid. Katseseadmete skeemid.
Pidurisüsteem on autojuhtimissüsteemi üks peamisi elemente, mida enamik õnnetusi võib hoiatada. Sel põhjusel diagnoos pidurdussüsteemi tuleks läbi õigeaegselt ja kvalitatiivselt. Isegi kõige väiksemad pidurihäired tuleb kohe kõrvaldada. Vastasel juhul võib see muutuda tõsise õnnetusena.
Diagnostika auto pidurisüsteemi
Tänu suurele vastutusele pidurisüsteemi inimeste ja liiklusohutuse eluks, selle kohandamine peaks toimuma ainult kvalifitseeritud spetsialistide ulatusliku kogemusega. Meie autoteenuses viiakse pidurisüsteemi diagnoos läbi spetsialiseeritud seadmete abil professionaalsed käsitöölised. Kõrge kvaliteediga jõudlust kinnitavad arvukad positiivsed ülevaated Meie kliendid. Diagnoosimise ja tõrkeotsingu tõhusus annab võimaluse oma auto kätte saada teenuse osutamise päeval. Pidurisüsteemi iga diagnostika sisaldab palju autotootjate soovitatud juhtimisoperatsioone. Leia meie seminar ei saa kaugeltki altufyevo metroojaamadest, Medvedkovo, Bibirevo (Moskva, Svao piirkond).
Pidurisüsteemi diagnostika: Mida näitavad talitlushäire?
Kõige sagedamini toimub auto pidurisüsteemi diagnoos, kui:
- väljapoole kuulutatud müra;
- pidurid on kuumad;
- pidurivedeliku lekked (mis tahes intensiivsus);
- kerge pedaalid;
- pidurite rike;
- suurendage piduri tee.
Neid talitlushäireid võib põhjustada tiheduse, pidurivedeliku puuduse, pidurikatte kulumise katkemise tõttu aNDIWME asendamine Pidurivedelik, padjad.
Kui üks neist märke tuvastatakse, nõuab tavalise töö kõrvalekalle pidurdussüsteemi pädev diagnostika, sealhulgas süsteemi kõigi elementide tiheduse kontrollimine, vaakumvõimendi, indikaatorseadmete töö, pneumaatilise täiturmehhanismi tiheduse. Autode jaoks S. pardaarvuti Optimaalne valik on diagnoosida arvuti või auto diagnostikakanneri abil, mis võib lugeda kontrolleri ploki vigadest.
Pidurisüsteemi rikke diagnostika
Tänapäeval saab pidurisüsteemi tööparameetrite diagnoosi kontrollida kahe peamise meetodi abil: pink ja tee. Pidurisüsteemi diagnostika talitlushäired Igaüks sisaldab järgmisi katseid ja mõõtmisi:
- piduri tee pikkus;
- kehtestatud sõiduki aeglustumine;
- lineaarne kõrvalekalle;
- tee kalle, kus masin on PBX;
- konkreetne pidurdusjõud;
- pidurisüsteemi tööaeg;
- koefitsient mitte-ühtluse piduri jõud samas teljel.
Praegu ei rakendata tee diagnostilist meetodit objektiivsuse ja mõju puudumise tõttu praktiliselt välised tegurid Mõju. Pidurisüsteemi diagnostika on spetsialiseerunud seista tõrked tagavad kõige täpsema mõõtmise. Saadud andmete põhjal on võimalik hinnata pidurisüsteemi staatust ja katsekeskva ohutuse kontrolli. Mõõtmiste summa ja kvaliteeti reguleeritakse rangelt õigusloome tasandil, mistõttu katseaeg läbib perioodilise kontrolli mõõtmiste täpsuse täitmise korrapärase kontrollimise.
Pidurisüsteemi diagnostika: Visuaalsed näited
Auto pidurisüsteemi diagnoos algab auto fikseerimisega samas asendis. Kui ühe koha peatamise tõhusus ei vasta nõutavatele parameetritele, saate süsteemist hinnata piduri vedeliku lekkeid.
Kui piduripedaal ei suuda kogu aeg ebaõnnestuda, näitab pidurisüsteemi diagnoos tõenäoliselt süsteemi jõustamise. Õhu eemaldamine pidurisüsteemist, on vaja taastada kuni piduri vedeliku taseme algtasemeni paagis.
Sageli võimalik põhjus Pidurisüsteemi tavapärase töö kõrvalekalded on õli olemasolu piduriklotsid. Samal ajal kuulati pidurismasinat iseloomulikku krigimist. Pidurisüsteemi diagnoos näitab piduriklotside füüsilist kulumist pärast nende asendamist, kaovad väljapoole. Kui te seda protseduuri ei täida õigeaegselt, saate piduriketta rikkuda.
Liiga tihe, piduripedaal liigub vaakumvõimendi või hermeetilise rikkumise lagunemisest. Auto pidurisüsteemi õigeaegne diagnostika aitab kiiresti kindlaks määrata veapaika.
Spontaanne pidurdamist võib provotseerida pidurisaduli või selle jaotuse positsiooni rikkumise tõttu. Pidurisüsteemi diagnoosimine vähendatakse pidurisadulite töö küsitlusele ja sõnastada nende tervise diagnoosi. Väga tihti on peamine purunemise põhjus süsteemi ühendusvoolikute tiheduse katkemine mehaaniliste mõjude tõttu.
Võttes auto suunas pidurdamise võib rääkida olemasolu probleemide pidurisadul või piduriklotsid. Pidurisüsteemi diagnoos on juhtimissuutluse ja pidurisüsteemi elementide teostamine masina ratastel. Lisaks on võimalus piduriklotside ebaühtlast kulumist.
Piduripiduri tugeva müra võib põhjustada piduri vooderite kulumisest või piduriketta tugeva korrosiooni kulumisest. Mõnikord diagnoosi pidurisüsteemi auto nende sümptomite näitab juuresolekul välismaiste objektide vahel piduriklots ja ketta.
Suure piduripedaali olemasolu on vaakumvõimendi talitlushäire tõttu kõige sagedamini. Mõnel juhul on sellised märgid iseloomulikud õhu juuresolekul hüdraulilise pidurisüsteemis. Pidurisüsteemi diagnoos aitab täpselt kindlaks määrata jaotuse põhjus ja vältida õnnetuse edasist arengut.
Liiga "pehme" pidurduspedaali käik on tõenäoliselt põhjustatud hüdraulilise süsteemi depressiivsusest või peamise pidurisilindri rikkest. Pidurisüsteemi diagnoos võib näidata ka piduri vedeliku ebarahuldavat seisundit.
Suure vastupidavus, kui vajutate piduripedaali, mis on tavaliselt tingitud vaakumvõimendi või hüdraulilise süsteemi kontuuri kahjustuste rikkest. Lisaks võivad uued piduriklotsid põhjustada sarnase nähtuse, millel ei olnud aega võtta. Auto pidurisüsteemi diagnostika sel juhul aitab määrata kindlaks tõsi rikke põhjus.
Tugev vibratsioon rool ja piduripedaalide näitavad tugevat kulumist pidurikettade, nõrgenemine kinnitus pidurisadul, kandke piduri hõõrdkatte. Auto pidurisüsteemi kõrge kvaliteediga diagnoosimine tagab jaotuse asukoha täpse avastamise ja lokaliseerimise.
Püsivalt aeglane liikumine võib olla tingitud seisupiduri, vaakumvõimendi või peamise pidurisilinduse ebaõigest reguleerimist. Et täpselt öelda, milline on selle nähtuse põhjus, on vaja auto pidurisüsteemi professionaalset diagnoosi.
Väliste mõjutegurid
Masina pidurisüsteemi toimimine võib sõltuvalt teatavate keskkonnategurite mõjust erineda:
- Erineva siduri koefitsiendiga rehvidel maanteel on absoluutselt erinevad pidurdusomadused. Samas mõjutavad järgmised tegurid siduri teega: rehvide rõhk, turvise sügavus ja ornament, ratta laius.
- Auto laadimise aste mõjutab oluliselt selle pidurdusrada. Mida tugevam sõiduk on koormatud, seda pikem on selle pidurdustee.
- Kummipiduri voolikute loomulik kulumine toob kaasa summutamise mõju, mis sujuvad pidurite teravust ja vastavalt nende tõhususe astet.
- Kokkuvarisemise ja lähenemise nurkade rikkumine põhjustab auto isolatsiooni pidurdamise ajal sirgjoonelise liikumissuuna suunas.
Pädev diagnoos auto pidurisüsteemi tingimata võtab arvesse kõiki neid tegureid välise mõju.
Üks peamisi turvasüsteeme on pidurisüsteem. Selle kvaliteedist sõltub see võimalus peatumise ajal, kui on mõningaid takistusi. Oluline on vähendada pidureid hea ja prognoositava olekus. Selleks tuleb neid regulaarselt kontrollida.
Pidurisüsteem diagnoositakse seista või teedel. Täpsemaid näitajaid saab kaasaegsetel diagnostilistel tähistel. Tööd viiakse läbi mis tahes tüüpi masinatega.
Seisu mõiste kohaselt on tavaline spetsialiseeritud ruumidesse paigutatud inventar, mille peamine eesmärk on auto tehnilise seisundi mitmetasandiline kontroll. Seisu diagnostikaga kontrollib selliseid parameetreid kõige sagedamini:
- andmed pidurdamise üldise tugevuse kohta;
- suhtelise ebatasasuskoefitsiendi väärtus;
- asünkroonse töö parameetrid.
Tööstuses kasutatakse mitmeid erinevaid seadmeid. Enamik neist tegutsevad asfaldi katmise imitatsiooni põhimõttel, kus pidurdusprotsessi ajal salvestavad instrumendid vajalikud andmed.
Seista pidurisüsteemi diagnoosimiseks
Sellised stendid võivad olla eraldatud seadmete kujul või olla osa suurest diagnostikakompleksist.
Diagnostiline vajadus
Sõiduki pidurisüsteemi diagnostika ja remont viiakse läbi nii komplekti intervalliga, siis iga auto mudeli puhul ja pärast kavandatavate vigade tuvastamist. Kõige sagedasemad märgid, mida masinat tuleb uurida, on need olukorrad:
- piduriratta selge tõstmine kuivale ja tahkele kattele;
- probleemid pidurite pedaaliga, kus kas sügavad tõusevad või insult;
- nähtav lahkumine sirge liikumisest piduripedaalile vajutamisel;
- vibratsioon, Humi, piduri piirkonnas;
- keeruline vähenemine vedeliku taset, nähtavaid trummid.

Pidurisüsteemi auto
Kaudsed sümptomid hõlmavad piduriklotside pinna ebaühtlast kulumist, voolikute või piduritorude nähtavat mehaanilist kahjustusi. Selline teave on tõsiselt saadud ilma rataste eemaldamata. Nii juht peab kord 30-40 tuhande km jooksul iseseisvalt uurima ratta taga probleemseid valdkondi.
Protseduur
Katse ajal on vaja kontrollida süsteemi seisundit tervikuna ja eraldi sõlmede Toimivuse jaoks. Enne diagnoosimist pidurisüsteemi seista, selliseid saite kontrollitakse:
- võimsus pidurivedelikuga;
- plaadi ja trummide seisukord;
- piduriklotsid;
- hubi laagri stabiilne kasutamine;
- caliper;
- töötajate silindrite käitamine;
- võimendi ja peamise pidurisilinder kasutamine;
- piduri voolikute seisund.

Ajal diagnostika ajal peaks auto helistama rataste paari erilisele kraele. Road pinnale imiteerivate rullide pöörlemine on seotud elektroonika ja arvuti erinevate anduritega. Installitud programm kuvab andmed silüümemõõturi kohta, ratta kiirus, piduripunkti näidustused. Analüüsi teostab spetsialist ettevõtte.
Hooldusjaamades on võimalik tuvastada ka mällu salvestatud seisab piduri tee optimaalsete andmete kohta sõltuvalt autost. Kui töötate, kuvab monitor mitte ainult absoluutseid väärtusi, vaid ka viga.
Andurid töötavad hüdraulilise põhimõttel. Nad valatud õli- või piduri vedeliku minimaalse viskoossuse näidud nii, et andmed on vähendatud viga negatiivsete temperatuuridel.
Pärast ühe telje katsetamist peate kontrollima teise telje toimivust. Selleks liigub auto lihtsalt rullide juurde teiste rataste poolt. Kõigi ratastega autode puhul kasutatakse autosid individuaalseid seisake.

Seal on seadmed, mis määrab püügikoormuse, mis moodustub piduripedaalide vajutamisel. Selle tulemusena kuvatakse teave arvuti ekraanil graafikuna. Kulud erinevate seisab sõltuvalt keerukust, on tavaliselt vahemikus 500 ... 900 tuhat rubla.
Remont põhineb diagnostika
Pärast pidurite probleemide tuvastamist tuleb auto remonti saata. Enamik protseduure, mis on seotud pidurisüsteemi toimimisega keskklassi autodes, ei ole autos kõige kallim. Enamik neist autojuht on võimeline täitma iseseisvalt isegi garaaži tingimused. Näiteks piduripadja asendamine on lisatud korrapärase hoolduse kohustusliku töö loetelusse.
Vooliku või peamiste kanalite asendamine on rohkem aeganõudev. Siin on vaja kogemusi või aidata spetsialiste. Süsteemist on vaja välja lülitada õhumullid, mis võivad selle tulemusi negatiivselt mõjutada. Vedeliku pumpamiseks õhust vajate partneri abi.
Diagnostilised parameetrid, auto pidurisüsteemide ja pidurdustegurite omadused on kasutusel.
Pidurite tehnilise seisundi määramiseks kasutatakse kolme meetodeid:
- Teedel, jooksvatel testidel;
- sisseehitatud diagnostiliste tööriistade tõttu töötamise ajal;
- Statsionaarsed tingimused piduri seisab.
Rike diagnoosimise ja lokaliseerimise loetelu
pidurid loovad GOST 26048-83. Need parameetrid jagunevad kaheks rühmaks. Esimene rühm hõlmab üldise diagnostika terviklikke parameetreid ja elemendi diagnostika teise täiendava (erasektori) parameetreid, et leida vigu individuaalsetes süsteemides ja seadmetes.
Esimese grupi diagnostilised parameetrid: auto piduri tee ja ratast, kõrvalekalded liikumise koridorist, auto ja ratta paigaldatud piduri jõudu) aeglustumisest, konkreetse piduri jõudu, Tee (millele auto hoitakse inhibeeritud olekus), telje rataste mitte-ühtsete pidurijõudude koefitsient, pidurijõudude jaotuskoefitsient aksiaalsel määral piduri draivi reaktsiooniaeg (või tühjendamine), rõhk ja kiirus selle muutuste muutmine piduri draivi kontuurides jne.
Teise rühma diagnostilised parameetrid: pedaali täielik ja vaba kursus, piduri vedeliku tase paagis, mitteoptilise ratta pöörlemisjõud, tee ja ratta ratta aeglustamine, ovaallisuse ja paksuse piduri trumli seina, piduri trumli seina deformatsiooni, paksus piduri vooderit, pidurdussülli löögiluba, mille kliirens hõõrdumispaar, rõhk draivi, kus padjad on seotud trumliga, jne.
Nende parameetrite hulgast vastavalt GOST 254780-82-le piduri jõud eraldi rattad, kogupõhine pidurdusjõud, pidurijõudude aksiaalne mittevastavus, piduri jõud, tingimata määratakse pidurite ajal. Samal ajal arvutatakse üldise konkreetse pidurdusjõu näitajad ja aksiaalse mittevastasuse koefitsiendi näitajad.
Maanteekatseid kasutatakse reeglina auto piduri kvaliteedi "jäme" hindamiseks. Samal ajal saab katsetulemusi määrata visuaalselt pidurdusteedel ja pidurdusrataste sünkroniseerimisel terava ühekordse pressimisega piduripedaalil (sidur on välja lülitatud), samuti kasutavad kaasaskantavad instrumendid - despomeetrid (või teismelised eerograafid).
Teekatsed tekitavad sageli lootust, et vastata auto veojõule, majandusliku piduri omadustele. Samal ajal veojõuks, majanduslik, piduriomadused Auto, selle liikumise kontrollitavuse ja stabiilsuse kohta, erinevatel kiirustel käitumine, erinevate koormustega, väljakujunenud ja täpsustamata režiimides, erinevates maanteel ja kliimatingimustes jne. Kuid teekatsetel on palju puudusi. Pidurirajal diagnoos tuleb läbi viia isegi kuiva, kuiva, horisontaalse osa teede tahke kattega vaba liikuva transpordi.
See katsemeetod on endiselt üsna laialt levinud, kuigi sellel on järgmised suhteliselt olulised puudused:
- 1. Pidurdamine on võimatu pakkuda stabiilset survet piduripedaalile sama pingutusega, mille tulemusena mõõtmise tulemused erinevad oluliselt iga pidurdamise.
- 2. Piduripidur sõltub suures osas juhi juhi kogemustest, teekatte seisundist ja liikumisolukordadest.
- 3. Ainult auto kogu aeglustumine määratakse. On võimatu eristada kõrvalekaldeid pidurdusjõudu üksikute rataste, mis määrab stabiilsuse liikumise auto pidurdamisel.
- 4. Kui katsetamisel tekkis õnnetuste oht.
- 5. Oluline aeg, mis kulub suure rehvide kulumise ja ratta luku tõttu suspensiooniga katsetamiseks.
- 6. Halbade kliimatingimustega (vihm, lumi, jää) on mõõtmisi teostada.
Loetletud põhjustel ei vasta pidurite juhtimine mööda pidurirada täielikult kaasaegseid nõudeid.
Autopidurite diagnoosimine teedel aeglasematele autodele viiakse läbi desceroberomeetrite (despersograafide) abil ka lamedale, kuivale, horisontaalsele osale. Kiirusel 10 ... 20 km / h, juht dramaatiliselt aeglustub kord vajutades piduripedaali, kui sidur on välja lülitatud. Samal ajal mõõdetakse auto aeglustumist, sõltumatult katsekiirusest.
Sõiduautode puhul peaks aeglustumine olema vähemalt 5,8 m / s 2 ja kaubaveo jaoks (sõltuvalt ülekandevõimest) - 5,0 kuni 4,2 m / s 2. Jaoks käsitsipidurid Aeglustumine peab olema 1,5 ... 2 m / s 2. Desseromeetri põhimõte (desperograafiline) on seadme liikuv inertsiaalne mass oma korpuse suhtes, mis on kinnitatud autoga. See liikumine on tingitud auto pidurdusest tuleneva inertstugevuse tegevusest ja proportsionaalselt selle aeglustumisega.
Inertsiaalne mass Disoleromeetri (Deslegorograph) võib olla järk-järgult liikuv koormus, pendel (tabel 9.1), vedela või kiirendus andur ja piirangu aeglustusmõõtur - käiguvahetusseade, skaala, häire lamp, kontrollija jne.
Dessellometri laskub autotööstuse pidurite tõhusust, mõõtes auto liikumise maksimaalse aeglustamise suurust pidurdamise ajal.
Seade tüüp - manuaal, inertsiaalsed toimingud, pendel.
Tabel 9.1.
Descerometers Modi tehnilised omadused. 1155m
Seade aluseks on pendeli, mida mõjutavad pidurdamises tekkivad inertsiaalsed jõud kõrvale kalduvad nullpositsioonist teatud nurga all, sõltuvalt aeglustumise väärtusest. Pendeli kõrvalekalle on registreeritud noolega, mis on ise määratletud ulatuse jagamisel, mis vastab saavutatud maksimaalsele aeglustusele. Instrumentide näidud Võrdle võrdluslaua andmetega (asetatud seadme ümbrise tagakaasile) ja hinnata pidurisüsteemi kvaliteeti.
Auto aeglane mõõtmine on tehtud auto pidurdamisel, üleskiirusele 30 km / h, asfaldi või tsemendi betoonkattega teede kuivale horisontaalsele osale.
Seade, mis kasutab kummist kostüümi, kinnitatakse auto esiklaasi sees.
Mitme paigaldatud pidurisüsteemide kasutamine, varustamine nende täiendavate seadmetega (lukustusvastased seadmed, hüdraulilised võimendid, automaatse reguleerimisseadmed hõõrdepaaris jne) ja sõiduki pidurdusnõuete karmistamine muudavad ebatõhusate teekatsete.
Ukrainas alates 01/01/1999, standard DSTU 3,649-97 "transpordi tubade tööstuse jõustus. Tehnilise seisundi ja kontrollimeetodite ohutusnõuded "GOST 25478-91 eelnevalt tegutseva riikidevaheliste standardi asemel. Käesolev dokument pakub kahte liiki juhtimispidurisüsteemi kontrolli (RTS): teekatsetused ja pinkide testid. Allpool on arvutatud juhtimismeetodid pidurisüsteemide, laenatud töölt ja NJ ja 686 N DTS ülejäänud kategooriad. Pidurdumisprotsessi käigus ei ole DTS liikumise trajektoori juht lubatud, kui liiklusohutuse tagamiseks ei ole vaja. Kui trajektoori reguleeritakse, ei loeta katsetulemust.
RTSi riik on hinnanguliselt tegeliku piduri tee väärtus, mis ei tohiks ületada tabelis nimetatud standardit. 9.1.
DSTU sõnul on lubatud hinnata RTS-i tulemuslikkust DTS-i väärtuse väärtuse kriteeriumist (J YCT.), mis peab olema vähemalt 5,8 m / s 2 DTS kategooriasse MJ ja 5,0 m / s 2 kõigi teiste jaoks (võttes arvesse tegevuskava põhineb DTS kategooriate MD. Samal ajal on vaja kontrollida vastust Pidurisüsteemi aeg, mis DTS-i hüdraulilise draivi puhul ei tohi olla üle 0,5 s ja teise draivi DTS-i puhul - mitte rohkem kui 0,8 s.
Pidurisüsteemi reageerimisaeg (t c) määratakse kindlaks Ukraina standard DSTU 2886-94 standardse ajavahemiku jooksul alates pidurdamise algusest kuni aja aeglustumise ajani, mil aeglustumine (DTS pidurdusjõud) võtab seadistusväärtuse.
Pidurisüsteemide diagnoosimise suurim tõhusus pakub spetsialiseerunud tähtaega, mis tagavad diagnoosi täpsuse ja täpsuse.
Protsessis seisab seisab mitmesuguseid disainilahendusi testiti. Kõik erinevused määravad peamised elemendid olid kontrollitud rataste tugipinnad.
Peamine seista tüüp on möödunud trumlite ebaühtlane seista.
Benchi testidpõhineb põhimõttel pöörduvus liikumise: auto kontrollitakse on liikumatu ja selle pöörlevad rattad põhinevad liikuva tugipinnale. Kõige tavalisemad seisavad on seotud rullide silindrilised pinnad. Kõik rattad pöörlevad täis-pealkirjaga seisab, uniaxial seisab - ainult ühe telje rattad.
Autode töö pingil simuleerib oma tegelikku tööd teedel. Nagu iga modelleerimise puhul, ei reprodutseerita kõik tegurid siin. reaalne liikumine, kuid ainult kõige olulisem (seista ja tehnoloogia testi arendaja seisukohast). Seega sissetuleva õhuvoolu ei modelleerita, mistõttu ei ole aerodünaamilise resistentsuse ajal veojõu testide ja termilise režiim töömootori muutub. Lisaks kasutage kasutusel enamasti uniaxial seisake, mis mõjutab oluliselt modelleerimisrežiimi.
Sellegipoolest on pinkide testidel mitmeid väga olulisi eeliseid.
Tabel 9.2.
Piduriratta normatiivsed väärtused operatsioonisõidukite jaoks (byDasta 3649-97)
Märkus: V 0 - Algne pidurduskiirus km / h.
Sihtkoha järgiseisab võib jagada veojõukontrollimiseks veojõu ja majanduslike omaduste juhtimiseks (see on võimsus agregaat), pidurid ja muud süsteemid.
Praeguste jõudude loomise meetodi abileristage võimsus, inertsiaalsed ja kombineeritud inertsiaalsed võimsusega seisavad. Kõige tavalisem seista kontrolli põhimõte on see, et sõiduki rattad suhtlevad stendi tugielementidega ja kahe rühma jõudude ratastel: sõidu ja pidurdamine. Looge need kas elektriseadmetega - mootorid ja pidurid või inertsiaalsed elemendid - massid ja hoorajad. Seega nimetatakse võimsuse ja inertsiaalsete katsemeetodite nimega.
Võimsuse meetodi puhul kasutatakse reeglina paigaldatud režiime, mis on pidev kiirus. Isertsiaalsel meetodil on alles identifitseerimata (dünaamilised) kiiruse muutmise režiimid kiirenduste tõttu, inertsiaalsed jõud (tabel 9.3).
Bensi testidegarTS-i tehnilise seisukorra kriteeriumid on täiendav pidurdusjõud ja sõiduki tööaeg seista, samuti pidurijõudude aksiaalse ühtsuse koefitsient iga telje jaoks. Kokku spetsiifiline piduri jõud (Y,) Seal peab olema vähemalt 0,59 ühe DTS kategooria MJ ja 0,51 kõigi teiste jaoks. Samal ajal ei tohiks mis tahes telje ühetaolisus koefitsiendi maksimaalne väärtus (a "H) ületada 20% pidurdusjõudude vahemikus 30 kuni 100% maksimaalsetest väärtustest. Need kriteeriumid arvutatakse vastavalt järgmistele valemitele:
kus R T. Max i - Pidurdusjõu maksimaalne väärtus / C ratast, H; p - piduri mehhanismidega varustatud rataste koguarv; M a - Auto mass, kg; g - Vaba languse kiirenemine, 980665 m / s 2;
kus R tl, r tp - pidurdusjõu väärtused sama telje vasakul ja paremal ratastel, n; R T. Maks - rohkem kahe nimetatud pidurdusjõu väärtuse väärtusest.
Tabel 9.3.
Seisade ja katsemeetodite eesmärk
Vastavalt GOST 25478 arvutatakse mittevastasuse koefitsient teisiti:

Pidurisüsteemi kasutamise aeg seista (t sp) on ajavahemik pidurdamise algusest kuni ajani, mil DTS-ratta pidurdusjõud, mis on halvimates tingimustes, jõuab pideva väärtuseni, määratakse DSTU 2886-94 poolt.
PTS seista tuleks katsetada täismassi seisundis. On lubatud katsetada DTS-i pneumaatilise täiturmehhanismiga ringikujulises olekus. Sellisel juhul tuleb rataste maksimaalne piduri jõud ja reaktsiooniaeg ümber arvutada. Bensi pidurdusjõu ja reageerimisaeg tuleb määrata aritmeetilise väärtusena vastavalt kolme katse tulemustele, ümardatud kümnendikuni. Kui nende väärtuste vaheline erinevus ja keskmiselt on rohkem kui 5%, tuleb katseid korrata. Nagu teemeetodi puhul, tuleks katseid läbi viia "külma" piduri mehhanismides.
Nõue teostada seiskumise juhtimise pidurid DTS riigi täielik mass tulu piiratud võimalused Enamik võimsust seisab pidurijõudude rakendamisel (0,7 ... 0,9 ratta koormuse koormusest; inertsiaalsetes seisates on see suhe mõnevõrra kõrgem - q. \u003d 1,0 ... 1,2). Nõue on ebareaalne; See ei ole juhus, et standardse tunnistab DTS-ile pneumaatilise vastuvõtuga (see tähendab, et enamik veokite ja bussi) testib ohjeldada. On võimalik, et seda jälgitakse sõiduautode sõidukitega, kus saab panna juhi salong, inspektor ja kaks või kolm inimest järjekorda. Aga juba väikebusside puhul rääkimata veoautod Ja bussid hüdrauliliste juhtmete piduritega, see on võimatu. Regulaarse operatiivjuhtimisega, mis viiakse läbi mootorsõidukite ettevõtetes (ATP) ja hooldusjaamades (hooldusjaam). Seda nõuet ei täheldata kunagi. Väljund võib olla kontrollitud rataste kunstlik toitmine, kuid masside paljunduste korgiga puistud ei saanud.
Kõigis standardite arvutamisstandardites kasutati pidurdusprotsessi lihtsustatud esindatust. Auto tegelik piduriskeemil on üsna keeruline konfiguratsioon. Üks näiteid aja aeglustuse aeglustumise kohta on näidatud joonisel fig. 9.1 (õhuke käigurea))