Ako pripojiť motor z HDD, CD, DVD (dostupné čipy ovládača motora a schéma zapojenia pre bezkomutátorové trojfázové motory). Motor pevného disku a Arduino
Pevné disky zvyčajne používajú trojfázové bezkomutátorové motory. Vinutia motora sú spojené hviezdou, to znamená, že dostaneme 3 výstupy (3 fázy). Niektoré motory majú 4 svorky, navyše majú stredný bod pripojenia pre všetky vinutia.
Povýšiť bezkomutátorový motor, je potrebné aplikovať napätie na vinutia v správnom poradí a v určitých časoch, v závislosti od polohy rotora. Na určenie momentu prepnutia sú na motore inštalované hallové snímače, ktoré fungujú ako spätná väzba.
Pri pevných diskoch sa na určenie momentu spínania v každom časovom okamihu pripájajú dve vinutia a na treťom sa meria napätie, na základe ktorého sa spínanie vykonáva. V 4-vodičovej verzii sú na to k dispozícii obe svorky voľného vinutia a pri motore s 3 svorkami je dodatočne vytvorený virtuálny stred pomocou rezistorov zapojených do hviezdy paralelne zapojených k vinutiu motora. Keďže vinutia sú spínané podľa polohy rotora, dochádza k synchronizácii medzi rýchlosťou rotora a magnetickým poľom vytváraným vinutiami motora. Zlyhanie pri synchronizácii môže viesť k zastaveniu rotora. 
Existujú špecializované mikroobvody ako TDA5140, TDA5141, 42.43 a ďalšie určené na riadenie bezkefových trojfázových motorov, ale tu ich nebudem brať do úvahy.
Vo všeobecnom prípade spínací diagram predstavuje 3 signály s pravouhlými impulzmi, fázovo posunutými o 120 stupňov. V najjednoduchšej verzii môžete naštartovať motor bez spätnej väzby, jednoducho tým, že doň napojíte 3 obdĺžnikové signály (meander), posunuté o 120 stupňov, čo som urobil. Počas jednej periódy meandru vykoná magnetické pole vytvorené vinutím jednu celú otáčku okolo osi motora. Rýchlosť otáčania rotora závisí od množstva magnetické póly Na neho. Ak je počet pólov dva (jeden pár pólov), rotor sa bude otáčať rovnakou frekvenciou ako magnetické pole. V mojom prípade má rotor motora 8 pólov (4 páry pólov), to znamená, že rotor sa otáča 4-krát pomalšie ako magnetické pole. Väčšina pevných diskov so 7200 otáčkami za minútu by mala mať 8 pólový rotor, ale to je len môj odhad, keďže som veľa pevných diskov netestoval. 
Ak sú na motor aplikované impulzy s požadovanou frekvenciou v súlade s požadovanou rýchlosťou rotora, motor sa neroztočí. Tu je potrebný postup zrýchlenia, to znamená, že najskôr aplikujeme impulzy s nízkou frekvenciou, potom ju postupne zvyšujeme na požadovanú frekvenciu. Okrem toho proces zrýchlenia závisí od zaťaženia hriadeľa.
Na spustenie motora som použil mikrokontrolér PIC16F628A. Výkonová časť obsahuje trojfázový most pomocou bipolárnych tranzistorov, aj keď je lepšie použiť tranzistory s efektom poľa na zníženie tvorby tepla. V podprograme obsluhy prerušení sa generujú obdĺžnikové impulzy. Na príjem 3 fázovo posunutých signálov sa vykoná 6 prerušení a získame jednu periódu meandru. V programe mikrokontroléra som implementoval plynulé zvýšenie frekvencie signálu na danú hodnotu. Celkom 8 režimov s rôznymi nastavenými frekvenciami signálu: 40, 80, 120, 160, 200, 240, 280, 320 Hz. S 8 pólmi na rotore získame nasledujúce rýchlosti otáčania: 10, 20, 30, 40, 50, 60, 70, 80 ot./min. 
Zrýchlenie začína pri frekvencii 3 Hz po dobu 0,5 sekundy, tento experimentálny čas je potrebný na počiatočné otočenie rotora v príslušnom smere, pretože sa stáva, že sa rotor otáča pod malým uhlom v opačnom smere, až potom sa začne otáčať v príslušnom smere. smer. V tomto prípade sa stratí moment zotrvačnosti a ak okamžite začnete zvyšovať frekvenciu, dôjde k desynchronizácii rotora jednoducho nebude držať krok s magnetickým poľom. Ak chcete zmeniť smer otáčania, stačí vymeniť ľubovoľné 2 fázy motora.
Po 0,5 sekunde sa frekvencia signálu postupne zvyšuje na špecifikovanú hodnotu. Frekvencia sa zvyšuje podľa nelineárneho zákona, rýchlosť zvyšovania frekvencie sa zvyšuje s postupujúcim zrýchlením. Čas zrýchlenia rotora na špecifikované otáčky: 3,8; 7,8; 11,9; 16; 20,2; 26,3; 37,5; 48,2 s. Vo všeobecnosti bez spätnej väzby motor zrýchľuje pomaly, požadovaný čas zrýchlenia závisí od zaťaženia hriadeľa, všetky experimenty som vykonal bez odstránenia magnetického disku („sakra“), samozrejme, zrýchlenie sa dá zrýchliť aj bez neho.
Prepínanie režimov sa vykonáva tlačidlom SB1, pričom režimy sú indikované LED diódami HL1-HL3, informácie sú zobrazené v binárnom kóde, HL3 je nulový bit, HL2 je prvý bit, HL1 je tretí bit. Keď sú všetky LED diódy vypnuté, dostaneme číslo nula, to zodpovedá prvému režimu (40 Hz, 10 ot./s), ak napríklad svieti LED HL1, dostaneme číslo 4, ktoré zodpovedá piatemu režimu (200 Hz, 50 ot./s). Pomocou spínača SA1 naštartujeme alebo zastavíme motor zatvorený stav kontaktov zodpovedá príkazu „Štart“.
Zvolený režim rýchlosti je možné zapísať do EEPROM mikrokontroléra, ak to chcete urobiť, musíte podržať tlačidlo SB1 na 1 sekundu a všetky LED diódy budú blikať, čím sa potvrdí nahrávanie. Štandardne, ak v EEPROM nie je žiadny záznam, mikrokontrolér prejde do prvého režimu. Uložením režimu do pamäte a nastavením spínača SA1 do polohy „Štart“ teda môžete naštartovať motor jednoduchým privedením energie do zariadenia.
Krútiaci moment motora je nízky, čo nie je potrebné pri práci s pevným diskom. Keď sa zaťaženie hriadeľa zvyšuje, dochádza k desynchronizácii a rotor sa zastaví. V zásade, ak je to potrebné, môžete pripojiť snímač rýchlosti a ak nie je signál, vypnite napájanie a znova naštartujte motor.
Pridaním 3 tranzistorov do trojfázového mostíka môžete znížiť počet riadiacich liniek mikrokontroléra na 3, ako je znázornené na obrázku nižšie. 
Pri použití starých HDD diskov na aplikačné účely niekedy nastane problém, že motor vretena sa zastaví nejaký čas po spustení. Majú taký „trik“ - ak nie sú prijímané žiadne signály z bloku hlavy do riadiaceho čipu, potom to čipu vodiča zakazuje otáčať motor. Na príklade niekoľkých modelov pohonov sa pokúsime zistiť, ako to vyriešiť.
Všetko to začalo tým, že priniesli niekoľko starých pevných diskov ( Obr.1) a povedali, že tu sú robotníci zmiešaní so „zabitými“, ak chcete, vyberte si, ak nechcete, robte, čo chcete. Ale ak prídete na to, ako ich použiť ako malý brúsny papier na vyrovnanie nástroja, povedzte mi to. No, tu vám hovorím...
Prvý HDD - "Quantum" z rodiny "Fireball TM". s hnacím čipom TDA5147AK ( Obr.2). Pozrime sa, aký je.

Horný kryt je zaistený 4 skrutkami v rohoch a jednou skrutkou a maticou umiestnenou navrchu pod nálepkami. Po odstránení krytu je viditeľný samotný pevný disk, čítacie hlavy a systém ovládania polohy magnetickej hlavy ( Obr.3). Odpojíme kábel, odskrutkujeme magnetický systém (tu budete potrebovať špeciálne zaostrený šesťhranný kľúč „hviezdička“). Na želanie je možné disk vybrať aj odskrutkovaním troch skrutiek na vretene motora (potrebný je aj šesťhranný kľúč).

Teraz nasadíme kryt, aby sme mohli prevrátiť HDD na pokusy s elektronikou a na napájací konektor priviesť napätie +5 V a +12V. Motor zrýchli, beží asi 30 sekúnd a potom sa zastaví (na doske s plošnými spojmi je zelená LED - svieti, keď sa motor otáča a bliká, keď sa zastaví).
Datasheet pre čip TDA5147K sa dá ľahko nájsť na internete, ale pomocou neho nebolo možné zistiť signál zapnutia/vypnutia otáčania. Pri „vyťahovaní“ signálov POR do napájacích zberníc nebolo možné dosiahnuť požadovanú reakciu, ale pri prezeraní signálov osciloskopom sa ukázalo, že keď sa sonda dotkne 7. pinu čipu TDA5147AK, resetuje sa a reštartuje motor. Teda po zhromaždení jednoduchý generátor krátke pulzy ( Obr.4, spodná fotka) s periódou niekoľkých sekúnd (alebo desiatok sekúnd) dokážete nechať motor točiť viac-menej neustále. Výsledné prestávky v napájaní trvajú asi 0,5 sekundy a to nie je kritické, ak sa motor používa s miernym zaťažením hriadeľa, ale v iných prípadoch to môže byť neprijateľné. Preto, hoci je metóda účinná, nie je úplne správna. Nikdy to však nebolo možné spustiť „správne“.

Ďalší HDD – "Quantum" z rodiny "Trailblazer". (Obr.5).

Po pripojení napájacieho napätia pohon nejaví žiadne známky života a mikroobvod 14-107540-03 na doske elektroniky sa začne veľmi zahrievať. V strede tela mikroobvodu je viditeľná vydutina ( Obr.6), čo naznačuje jeho zjavnú nefunkčnosť. Je to škoda, ale nie strašidelná.

Pozeráme sa na čip riadenia otáčania motora ( Obr.7) - HA13555. Pri napájaní sa nezahrieva a nie je na ňom viditeľné žiadne poškodenie. Testovanie „potrubných“ prvkov testerom neodhalilo nič zvláštne – zostáva už len vymyslieť „zapínací“ obvod.

Vyhľadávače k nemu nenájdu dátové listy, ale je tam popis pre HA13561F. Je vyrobený v rovnakom puzdre, zhoduje sa s napájacími nohami a „výstupnými“ kolíkmi s HA13555 (ten má diódy prispájkované k napájacím vodičom motora - ochrana proti spätnému EMF). Pokúsme sa určiť potrebné výstupy kontroly. Z údajového listu na HA13561F ( Obr.8) z toho vyplýva, že pin 42 (HODINY) musí byť napájaný hodinovou frekvenciou 5 MHz s logickou úrovňou TTL a že signál umožňujúci naštartovanie motora je vysoký stupeň na kolíku 44 (SPNENAB).

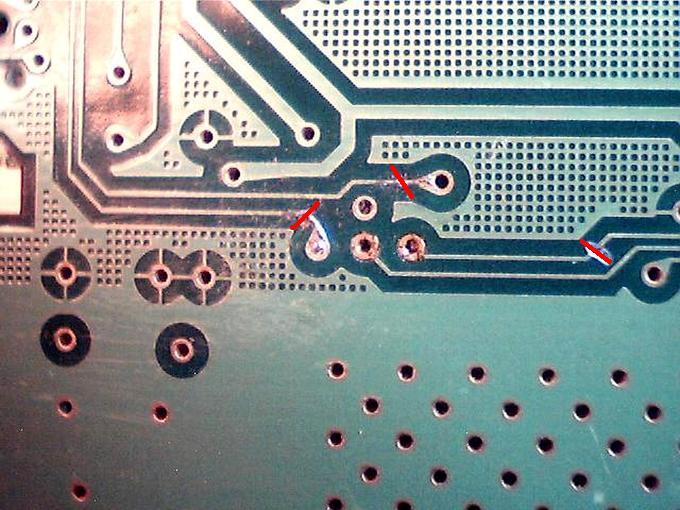
Keďže mikroobvod 14-107540-03 nefunguje, prerušili sme napájanie +5 V z neho a zo všetkých ostatných mikroobvodov okrem HA13555 ( Obr.9). Pomocou testera kontrolujeme správnosť „rezov“ absenciou spojení.
Na spodnej fotke obrázok 9Červené bodky znázorňujú miesta, kde je prispájkované napätie +5 V pre HA13555 a pull-up rezistor jeho 44 pinov. Ak je rezistor z kolíka 45 odstránený z pôvodného miesta (ide o R105 podľa Obrázok 8) a umiestnite ho zvisle s určitým sklonom k mikroobvodu, potom je možné na priechodný otvor a na závesný kolík prvého odporu prispájkovať ďalší odpor na vytiahnutie kolíka 44 do „plus“ ( Obr.10) a potom je možné napájať +5 V na miesto, kde sú pripojené.

Zapnuté zadná strana dosky by mali byť rezané podľa obrázka Obrázok 11. Toto sú „bývalé“ signály pochádzajúce z vyhoreného mikroobvodu 14-107540-03 a starého „vyťahovacieho“ odporu R105.
Prívod „nových“ hodinových signálov na pin 42 (CLOCK) môžete zorganizovať pomocou dodatočného externého generátora namontovaného na akomkoľvek vhodnom čipe. V tomto prípade bol použitý K555LN1 a výsledný obvod je zobrazený v Obrázok 12.

Po „nahození“ +5 V napájacieho napätia vodičom MGTF priamo z konektora na pin 36 (Vss) a ďalšie požadované spojenia ( Obr.13), pohon sa spustí a beží nepretržite. Prirodzene, ak by bol mikroobvod 14-107540-03 v dobrom prevádzkovom stave, všetky úpravy by pozostávali iba z „utiahnutia“ 44. kolíka k +5 V zbernici.

Táto „skrutka“ slúžila na testovanie jeho výkonu pri iných taktovacích frekvenciách. Signál bol dodávaný z externého generátora štvorcových vĺn a minimálna frekvencia, pri ktorej pohon stabilne pracoval, bola 2,4 MHz. Pre viac nízke frekvencie zrýchlenie a zastavenie prebiehalo cyklicky. Maximálna frekvencia je asi 7,6 MHz pri jej ďalšom zvyšovaní zostal počet otáčok rovnaký.
Počet otáčok závisí aj od úrovne napätia na pine 41 (CNTSEL). V údajovom liste pre čip HA13561F je tabuľka a zodpovedá hodnotám získaným z HA13555. V dôsledku všetkých manipulácií bolo možné dosiahnuť minimálnu rýchlosť otáčania motora asi 1800 ot / min a maximálnu rýchlosť 6864 ot / min. Kontrola bola vykonaná pomocou programu, optočlena so zosilňovačom a kusom elektrickej pásky nalepeným na disku tak, aby pri otáčaní kotúča prekrývalo okno optočlena (frekvencia opakovania impulzov sa určuje v okne spektrálneho analyzátora a potom sa vynásobí o 60).
Tretia jazda - "SAMSUNG WN310820A".
Po pripojení napájania sa čip ovládača - HA13561 začne veľmi zahrievať, motor sa neotáča. Na tele čipu je viditeľná vydutina ( Obr.14), ako v predchádzajúcom prípade. Nebude možné vykonávať žiadne experimenty, ale môžete skúsiť napájať motor z dosky s čipom HA13555. Na kábel motora a na výstupné kontakty konektora dosky elektroniky boli prispájkované dlhé tenké vodiče - všetko nabehlo a fungovalo bez problémov. Ak by bol HA13561 neporušený, úprava pre štart by bola rovnaká ako pre Quantum Trailblazer (pin 44 k +5 V zbernici).

Štvrtá jazda - "Quantum" z rodiny "Fireball SE". s pohonným čipom AN8426FBP ( Obr.15).

Ak odpojíte kábel hlavnej jednotky a zapnete HDD, motor naberie otáčky a po chvíli sa samozrejme zastaví. Údajový list pre čip AN8426FBP je dostupný online a môžete ho použiť na zistenie, že za spustenie je zodpovedný kolík 44 (SIPWM) ( Obr.16). A ak teraz prerušíte stopu prichádzajúcu z mikroobvodu 14-108417-02 a „vytiahnete“ kolík 44 cez odpor 4,7 kOhm do +5 V zbernice, motor sa nezastaví.

A nakoniec, keď sa vrátime trochu späť, priebehy boli odobraté na kolíkoch W a V čipu HA13555 vzhľadom na spoločný vodič ( ryža. 17).

Najjednoduchšie praktické využitie starého HDD je malý šmirgľ na rovnanie vrtákov, nožov, skrutkovačov ( Obr.18). Ak to chcete urobiť, stačí prilepiť brúsny papier na magnetický disk. Ak mala „skrutka“ niekoľko „palaciniek“, môžete si vyrobiť vymeniteľné disky rôznych veľkostí zŕn. A tu by bolo fajn mať možnosť prepínať rýchlosť otáčania vretenového motora, pretože pri veľkom počte otáčok je veľmi ľahké prehrievať brúsený povrch.

Emery, samozrejme, nie je jediné využitie starého HDD. Návrhy vysávačov a dokonca aj strojčeka na výrobu cukrovej vaty nájdete jednoducho online...
Okrem textu sú tu uvedené datasheety a súbory dosky plošných spojov externé generátory impulzov v programovom formáte verzie 5 (pohľad zo strany tlače, mikroobvody sú inštalované ako SMD, t.j. bez vŕtania otvorov).
Andrey Goltsov, r9o-11, Iskitim, apríl 2018.
Zoznam rádioelementov
| Označenie | Typ | Denominácia | Množstvo | Poznámka | Obchod | Môj poznámkový blok | |
|---|---|---|---|---|---|---|---|
| K obrázku č.4 | |||||||
| DD1 | Čip | K561LN2 | 1 | Do poznámkového bloku | |||
| R1, R2 | Rezistor | 470 kOhm | 2 | smd 0805 | Do poznámkového bloku | ||
| R4 | Rezistor | 10 kOhm | 1 | smd 0805 | |||
Takýto motor roztočíte pripojením k trom polovičným mostíkovým stupňom, ktoré sú riadené trojfázovým generátorom, ktorého frekvencia je po zapnutí veľmi nízka a postupne sa zvyšuje na nominálnu. Nie je Najlepšie rozhodnutieúloha, takýto obvod nemá spätnú väzbu a preto sa frekvencia generátora zvýši v nádeji, že motor stihne nabrať otáčky, aj keď v skutočnosti jeho hriadeľ stojí. Vytvorenie okruhu s spätná väzba by vyžadovalo použitie snímačov polohy rotora a niekoľkých krytov IC, nepočítajúc výstupné tranzistory. CD/DVD-ROM už obsahuje hallove senzory, z ktorých signálov viete určiť polohu rotora motora, no niekedy nie je presná poloha vôbec dôležitá a nechcete zbytočne plytvať „drôtmi navyše“.
Našťastie priemysel vyrába hotové jednočipové riadiace ovládače, ktoré navyše nevyžadujú snímače polohy rotora ako také snímače;
Riadiace čipy pre trojfázové jednosmerné motory, ktoré nevyžadujú prídavné senzory(snímače sú samotné vinutia motora):
LB11880; TDA5140; TDA5141; TDA5142; TDA5144; TDA5145.
Existujú aj iné, ale z nejakého dôvodu nie sú v predaji, kde som hľadal, a nemám rád čakanie 2 až 30 týždňov na objednávku.
Schéma pripojenia motora k čipu LB11880
Spočiatku bol tento mikroobvod navrhnutý na ovládanie motora BVG videorekordérov, takže je starý, vo svojich kľúčových fázach bipolárne tranzistory nie MOSFETy.Vo svojich návrhoch som použil tento konkrétny mikroobvod po prvé, bol k dispozícii v najbližšom obchode a po druhé, jeho cena bola nižšia ako cena iných mikroobvodov z vyššie uvedeného zoznamu.
V skutočnosti schéma spínania motora:

Ak váš motor nemá 3, ale 4 svorky, potom by mal byť pripojený podľa schémy:

Málo Ďalšie informácie o LB11880 a viac
Motor zapojený podľa uvedených obvodov bude zrýchľovať, kým sa nedosiahne buď limit frekvencie generovania mikroobvodu VCO, ktorý je určený menovitými hodnotami kondenzátora pripojeného na kolík 27 (čím menšia je jeho kapacita, tým vyššia je frekvencia), alebo je motor mechanicky zničený.Nemali by ste príliš znižovať kapacitu kondenzátora pripojeného na kolík 27, pretože to môže sťažiť naštartovanie motora.
Ako regulovať rýchlosť otáčania?
Rýchlosť otáčania sa nastavuje zmenou napätia na kolíku 2 mikroobvodu, v tomto poradí: Vpit - maximálna rýchlosť; 0 - motor je zastavený.
Treba však poznamenať, že nebude možné plynulo regulovať frekvenciu jednoducho pomocou premenlivého odporu, pretože nastavenie nie je lineárne a vyskytuje sa v menších medziach ako Vpit - 0, preto najlepšia možnosť Na tento kolík bude pripojenie kondenzátora, do ktorého je privádzaný PWM signál cez odpor, napríklad z mikrokontroléra.
Na určenie aktuálnej rýchlosti otáčania by ste mali použiť kolík 8 mikroobvodu, ktorý obsahuje impulzy pri otáčaní hriadeľa motora, 3 impulzy na 1 otáčku hriadeľa.
Ako nastaviť maximálny prúd vo vinutí?
Je známe, že trojfázové motory na jednosmerný prúd spotrebúvajú značný prúd mimo svojich prevádzkových režimov (keď sú ich vinutia napájané impulzmi nízkej frekvencie).
Na nastavenie maximálneho prúdu v tomto obvode sa používa odpor R1.
Hneď ako pokles napätia na R1 a teda na kolíku 20 dosiahne viac ako 0,95 voltov, výstupný budič mikroobvodu preruší impulz.
Pri výbere hodnoty R1 majte na pamäti, že pre tento mikroobvod nie je maximálny prúd väčší ako 1,2 ampéra, nominálny prúd je 0,4 ampéra.
Parametre čipu LB11880
Napájacie napätie koncového stupňa (pin 21): 8 ... 13 voltov (maximálne 14,5);
Napájacie napätie jadra (kolík 3): 4 ... 6 voltov (maximálne 7);
Maximálny výkon rozptýlený mikroobvodom: 2,8 wattu;
Rozsah prevádzkových teplôt: -20 ... +75 stupňov.
Ale vlastne, prečo som použil motor z HDD v spojení so špecifikovaným mikroobvodom: 
Tento disk (aj keď na ňom ešte neboli medené skrutky), zdanlivo malý a zakrpatený motor zo starého pevného disku Seagate Barracuda, 40 GB, určený na 7200 otáčok/min (RPM) dokázal zrýchliť na 15 000 ... 17 000 otáčok. /min , ak som mu neobmedzil rýchlosť. Takže si myslím, že rozsah použitia motorov z opustených pevných diskov je dosť rozsiahly. Jasné, že brúsku/vŕtačku/brúsku nevyrobíte, to ani nepomyslite, ale bez špeciálnej záťaže sú motory schopné veľa, napríklad ak nimi otáčate bubon so zrkadlami. , na mechanické snímanie laserového lúča a pod.
Pred časom som narazil na okruh vodičov krokový motor na čipe LB11880, ale keďže som taký čip nemal a okolo ležalo niekoľko motorov, zaujímavý projekt štartovania motora som pozastavil. Čas plynul a teraz s rozvojom Číny nie sú žiadne problémy s dielmi, tak som si objednal MS a rozhodol som sa zostaviť a otestovať pripojenie vysokorýchlostných motorov z HDD. Okruh vodiča sa berie ako štandard:
Okruh pohonu motora
Nasleduje krátky popis článku, prečítajte si celý článok. Motor, ktorý otáča vreteno pevného disku (alebo CD/DVD-ROM) je bežný synchrónny trojfázový jednosmerný motor. Priemysel vyrába hotové jednočipové riadiace budiče, ktoré navyše nevyžadujú snímače polohy rotora, pretože ako snímače fungujú vinutia motora. Riadiace čipy pre trojfázové jednosmerné motory, ktoré nevyžadujú ďalšie snímače, sú TDA5140; TDA5141; TDA5142; TDA5144; TDA5145 a samozrejme LB11880.

Motor zapojený podľa uvedených obvodov bude zrýchľovať, kým sa nedosiahne buď limit frekvencie generovania mikroobvodu VCO, ktorý je určený menovitými hodnotami kondenzátora pripojeného na kolík 27 (čím menšia je jeho kapacita, tým vyššia je frekvencia), alebo je motor mechanicky zničený. Nemali by ste príliš znižovať kapacitu kondenzátora pripojeného na kolík 27, pretože to môže sťažiť naštartovanie motora. Rýchlosť otáčania sa nastavuje zmenou napätia na kolíku 2 mikroobvodu, v tomto poradí: Vpit - maximálna rýchlosť; 0 - motor je zastavený. Je tam aj signet od autora, no vytvoril som si vlastnú verziu ako kompaktnejšiu.

Neskôr mi dorazili mnou objednané mikroobvody LB11880, zaspájkoval som ich do dvoch hotových šatiek a jeden z nich otestoval. Všetko funguje skvele: rýchlosť je regulovaná premenlivým voličom otáčok, ťažko určiť otáčky, ale myslím, že do 10 000 je to určite, keďže motor slušne hučí.

Vo všeobecnosti sa začalo, budem premýšľať o tom, kde ho uplatniť. Existuje nápad vyrobiť z neho rovnaký brúsny kotúč, aký má autor. A teraz som to otestoval na kúsku plastu, urobil som to ako ventilátor, fúka to len brutálne, hoci na fotografii ani nevidíte, ako sa točí.

Otáčky nad 20 000 zvýšite prepnutím kapacít kondenzátora C10 a napájaním MS až do 18 V (18,5 V limit). Pri tomto napätí mi motor úplne zapískal! Tu je video s napätím 12 voltov:
Video o pripojení motora HDD
Pripojil som aj motor z CD, poháňal napájaním 18 V, keďže ten môj má vo vnútri gule, zrýchľuje tak, že všetko okolo skáče! Je škoda nesledovať otáčky, ale súdiac podľa zvuku je veľmi vysoký, až na tenkú píšťalku. Otázkou je, kde uplatniť takéto rýchlosti? Na rad prichádza mini brúska, stolová vŕtačka, brúska... Aplikácií je veľa – porozmýšľajte sami. Zbierajte, testujte, zdieľajte svoje dojmy. Na internete je veľa zaujímavých recenzií pomocou týchto motorov domáce vzory. Videl som video na internete, kde Kulibiny vyrábajú pumpy, super ventilátory, orezávačky s týmito motormi, zaujímalo by ma, kde sa dajú použiť také otáčky, motor tu zrýchľuje cez 27 000 ot./min. Bol som s tebou Igoran.
Diskutujte o článku AKO PRIPOJIŤ MOTOR Z DVD ALEBO HDD
. Téma je to určite zaujímavá, najmä pre začínajúcich rádiových „trýzniteľov“, ale podľa môjho názoru nie je ani zďaleka pokrytá. Nielogický záver, teda akú schému použil veľmi uznávaný TwIsTeRza moje rozhodnutie, či už navrhol (môj kolega z novinárskej práce)S anyaav na M/S TDA5145, MK alebo nejaký iný. Týmto článkom chcem vyplniť niektoré medzery vo fóre a povedať vám, podľa môjho názoru, o starom mikroobvode, ktorý je celkom slušný aj podľa moderných štandardovLB11880. A tak začnime a začnime všeobecnými informáciami, čo je motor z HDD, CD-ROM, DVD-ROMMotor, ktorý otáča vreteno pevného disku (alebo CD/DVD-ROM) je synchrónny trojfázový jednosmerný motor.
Takýto motor môžete roztočiť pripojením k trom polomostovým kaskádam, ktoré sú riadené trojfázovým generátorom, ktorého frekvencia je po zapnutí veľmi nízka a postupne sa zvyšuje na nominálnu. Toto nie je najlepšie riešenie problému, takýto obvod nemá spätnú väzbu a preto sa frekvencia generátora zvýši v nádeji, že motor stihne nabrať otáčky, aj keď v skutočnosti jeho hriadeľ stojí. Vytvorenie obvodu s uzavretou slučkou by vyžadovalo použitie snímačov polohy rotora a niekoľkých integrovaných obvodov, nepočítajúc výstupné tranzistory. CD/DVD-ROM už obsahuje hallove senzory, z ktorých signálov viete určiť polohu rotora motora, no niekedy nie je presná poloha vôbec dôležitá a nechcete zbytočne plytvať „drôtmi navyše“.
Našťastie priemysel vyrába hotové jednočipové riadiace ovládače, ktoré navyše nevyžadujú snímače polohy rotora ako také snímače;Riadiace čipy pre trojfázové motory na jednosmerný prúd, ktoré nevyžadujú ďalšie snímače (snímače sú samotné vinutia motora):TDA 5140; TDA 5141; TDA 5142; TDA 5144; TDA 5145 a samozrejme LB 11880. (Existujú aj iné, ale na inokedy.)
Schematický diagram pripojenia motora k mikroobvodu LB11880.
Spočiatku je tento mikroobvod určený na ovládanie motora videorekordérov BVG v kľúčových fázach má bipolárne tranzistory a nie MOSFET;Vo svojich návrhoch som použil tento konkrétny mikroobvod po prvé, bol k dispozícii v najbližšom obchode a po druhé, jeho cena bola nižšia (aj keď nie oveľa) ako cena iných mikroobvodov z vyššie uvedeného zoznamu.
V skutočnosti schéma spínania motora:

Ak váš motor zrazu nemá 3, ale 4 výstupy, potom by mal byť pripojený podľa schémy:

A ešte jeden vizuálnejší diagram, prispôsobený na použitie v aute.
Trochu viac informácií o LB11880 a ďalšie
Motor zapojený podľa uvedených obvodov bude zrýchľovať, kým sa nedosiahne buď limit frekvencie generovania mikroobvodu VCO, ktorý je určený menovitými hodnotami kondenzátora pripojeného na kolík 27 (čím menšia je jeho kapacita, tým vyššia je frekvencia), alebo je motor mechanicky zničený.Nemali by ste príliš znižovať kapacitu kondenzátora pripojeného na kolík 27, pretože to môže sťažiť naštartovanie motora.
Ako regulovať rýchlosť otáčania?
Rýchlosť otáčania sa nastavuje zmenou napätia na kolíku 2 mikroobvodu, v tomto poradí: Vpit - maximálna rýchlosť; 0 - motor je zastavený.
Treba však poznamenať, že nebude možné plynulo regulovať frekvenciu jednoducho pomocou premenlivého odporu, pretože nastavenie nie je lineárne a vyskytuje sa v menších medziach ako Vpit - 0, takže najlepšou možnosťou by bolo pripojenie kondenzátora na tento kolík, ku ktorému cez odpor, napríklad z mikrokontroléra, PWM signál alebo PWM regulátor na svetoznámom časovačiNE555 (na internete je veľa takýchto schém)
Na určenie aktuálnej rýchlosti otáčania by ste mali použiť kolík 8 mikroobvodu, ktorý obsahuje impulzy pri otáčaní hriadeľa motora, 3 impulzy na 1 otáčku hriadeľa.
Ako nastaviť maximálny prúd vo vinutí?
Je známe, že trojfázové motory na jednosmerný prúd spotrebúvajú značný prúd mimo svojich prevádzkových režimov (keď sú ich vinutia napájané impulzmi nízkej frekvencie).Na nastavenie maximálneho prúdu v tomto obvode sa používa odpor R1.Hneď ako pokles napätia na R1 a teda na kolíku 20 dosiahne viac ako 0,95 voltov, výstupný budič mikroobvodu preruší impulz.Pri výbere hodnoty R1 majte na pamäti, že pre tento mikroobvod nie je maximálny prúd väčší ako 1,2 ampéra, nominálny prúd je 0,4 ampéra.
Parametre čipu LB11880
Napájacie napätie koncového stupňa (pin 21): 8 ... 13 voltov (maximálne 14,5);
Napájacie napätie jadra (kolík 3): 4 ... 6 voltov (maximálne 7);
Maximálny výkon rozptýlený mikroobvodom: 2,8 wattu;
Rozsah prevádzkových teplôt: -20 ... +75 stupňov.

Tento disk (aj keď ešte na ňom neboli medené skrutky), zdanlivo malý a zakrpatený motor zo starého 40GB pevného disku, určený na 7200 otáčok/min (RPM), dokázal zrýchliť na približne 15000 ... 17000 otáčok/ min, ak neobmedzíte jeho rýchlosť. Takže si myslím, že rozsah použitia motorov z opustených pevných diskov je dosť rozsiahly. Samozrejme, nemôžete urobiť ostričku / vŕtačku / brúsku, ani o tom nepremýšľajte, ale bez špeciálneho zaťaženia sú motory schopné veľa.
F
archív súborov pre svojpomocná montáž Stiahnuť ▼
VEĽA ŠTASTIA!!